The Ethernet Frame
The organization of the Ethernet frame is central to the operation of the system. The Ethernet standard determines both the structure of a frame and when a station is allowed to send a frame. The frame was first defined in the original Ethernet DEC-Intel-Xerox (DIX) standard, and was later redefined and modified in the IEEE 802.3 standard. The changes between the two standards were mostly cosmetic, except for the type or length field.
The DIX standard defined a type field in the frame. The first 802.3 standard (published in 1985) specified this field as a length field, with a mechanism that allowed both versions of frames to coexist on the same Ethernet system. Most networking software kept using the type field version of the frame. A later version of the IEEE 802.3 standard was changed to define this field of the frame as being either length or type, depending on usage.
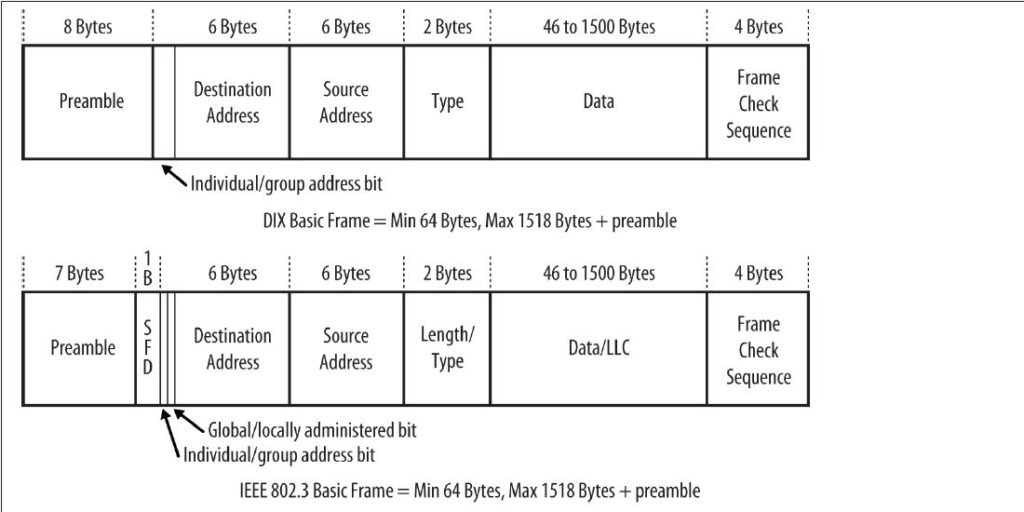
Figure 1-1 shows the DIX and IEEE versions of the Ethernet frame. There are three sizes of frame currently defined in the standard, and a given Ethernet interface must support at least one of them. The standard recommends that new implementations support the most recent frame definition, called an envelope frame, which has a maximum size of 2,000 bytes. The two other sizes are basic frames, with a maximum size of 1,518 bytes, and Q-tagged frames with a maximum of 1,522 bytes.

Because the DIX and IEEE basic frames both have a maximum size of 1,518 bytes and are identical in terms of the number and length of fields, Ethernet interfaces can send either DIX or IEEE basic frames. The only difference in these frames is in the contents of the fields and the subsequent interpretation of those contents by the network interface software.
Now, we’ll take a detailed tour of the frame fields.
Preamble
The frame begins with the 64-bit preamble field, which was originally incorporated to allow 10 Mb/s Ethernet interfaces to synchronize with the incoming data stream before the fields relevant to carrying the content arrived.
The preamble was initially provided to allow for the loss of a few bits due to signal start- up delays as the signal propagates through a cabling system. Like the heat shield of a spacecraft, which protects the spacecraft from burning up during reentry, the preamble was originally developed as a shield to protect the bits in the rest of the frame when operating at 10 Mb/s.
The original 10 Mb/s cabling systems could include long stretches of coaxial cables, joined by signal repeaters. The preamble ensures that the entire path has enough time to start up, so that signals are re‐ ceived reliably for the rest of the frame.
The higher-speed Ethernet systems use more complex mechanisms for encoding the signals that avoid any signal start-up losses, and these systems don’t need a preamble to protect the frame signals. However, it is maintained for backward compatibility with the original Ethernet frame and to provide some extra timing for interframe house‐ keeping, as demonstrated, for example, in the 40 Gb/s system.
While there are differences in how the two standards formally defined the preamble bits, there is no practical difference between the DIX and IEEE preambles. The pattern of bits being sent is identical:
DIX standard
In the DIX standard, the preamble consists of eight “octets,” or 8-bit bytes. The first seven comprise a sequence of alternating ones and zeros. The eighth byte of the preamble contains 6 bits of alternating ones and zeros, but ends with the special pattern of “1, 1.” These two bits signal to the receiving interface that the end of the preamble has been reached, and that the bits that follow are the actual fields of the frame.
IEEE standard
In the 802.3 specification, the preamble field is formally divided into two parts consisting of seven bytes of preamble and one byte called the start frame delimit‐ er (SFD). The last two bits of the SFD are 1, 1, as with the DIX standard.
Destination Address
The destination address field follows the preamble. Each Ethernet interface is assigned a unique 48-bit address, called the interface’s physical or hardware address. The desti‐nation address field contains either the 48-bit Ethernet address that corresponds to the address of the interface in the station that is the destination of the frame, a 48-bit mul‐ ticast address, or the broadcast address.
Ethernet interfaces read in every frame up through at least the destination address field. If the destination address does not match the interface’s own Ethernet address, or one of the multicast or broadcast addresses that the interface is programmed to receive, then the interface is free to ignore the rest of the frame. Here is how the two standards implement destination addresses:
DIX standard
The first bit of the destination address, as sent onto the network medium, is used to distinguish physical addresses from multicast addresses. If the first bit is zero, then the address is the physical address of an interface, which is also known as a unicast address, because a frame sent to this address only goes to one destination. If the first bit of the address is a one, then the frame is being sent to a multicast address. If all 48 bits are ones, this indicates the broadcast, or all-stations, address.
IEEE standard
The IEEE 802.3 version of the frame adds significance to the second bit of the destination address, which is used to distinguish between locally and globally ad‐ ministered addresses. A globally administered address is a physical address assigned to the interface by the manufacturer, which is indicated by setting the second bit to zero. (DIX Ethernet addresses are always globally administered.) If the address of the Ethernet interface is administered locally for some reason, then the second bit is supposed to be set to a value of one. In the case of a broadcast address, the second bit and all other bits are ones in both the DIX and IEEE standards.
Locally administered addresses are rarely used on Ethernet systems, because each Ethernet interfaces is assigned its own unique 48-bit address at the factory. Locally administered addresses, however, were used on some other local area network systems.
Understanding physical addresses
In Ethernet, the 48-bit physical address is written as 12 hexadecimal digits with the digits paired in groups of two, representing an octet (8 bits) of information. The octet order of transmission on the Ethernet is from the leftmost octet (as written or displayed) to the rightmost octet. The actual transmission order of bits within the octet, however, goes from the least significant bit of the octet through to the most significant bit.
This means that an Ethernet address that is written as the hexadecimal string F0-2E-15-6C-77-9B is equivalent to the following sequence of bits, sent over the Ether‐net channel from left to right:
0000 1111 0111 0100 1010 1000 0011 0110 1110 11101101 1001.
Therefore, the 48-bit destination address that begins with the hexadecimal value 0xF0 is a unicast address, because the first bit sent on the channel is a zero.
Source Address
The next field in the frame is the source address. This is the physical address of the device that sent the frame. The source address is not interpreted in any way by the Ethernet MAC protocol, although it must always be the unicast address of the device sending the frame. It is provided for the use of high-level network protocols, and as an aid in troubleshooting. It is also used by switches to build a table associating source addresses with switch ports. An Ethernet station uses its physical address as the source address in any frame it transmits.
The DIX standard notes that a station can change the Ethernet source address, while the IEEE standard does not specifically state that an interface may have the ability to override the 48-bit physical address assigned by the manufacturer. However, all Ethernet interfaces in use these days appear to allow the physical address to be changed, which makes it possible for the network administrator or the high-level network software to modify the Ethernet interface address if necessary.
To provide the physical address used in the source address field, a vendor of Ethernet equipment acquires an organizationally unique identifier (OUI), which is a unique 24- bit identifier assigned by the IEEE. The OUI forms the first half of the physical address of any Ethernet interface that the vendor manufactures. As each interface is manufac‐ tured, the vendor also assigns a unique address to the interface using the second 24 bits of the 48-bit address space, and that, combined with the OUI, creates the 48-bit address. The OUI may make it possible to identify the vendor of the interface chip, which can sometimes be helpful when troubleshooting network problems.
Q-Tag
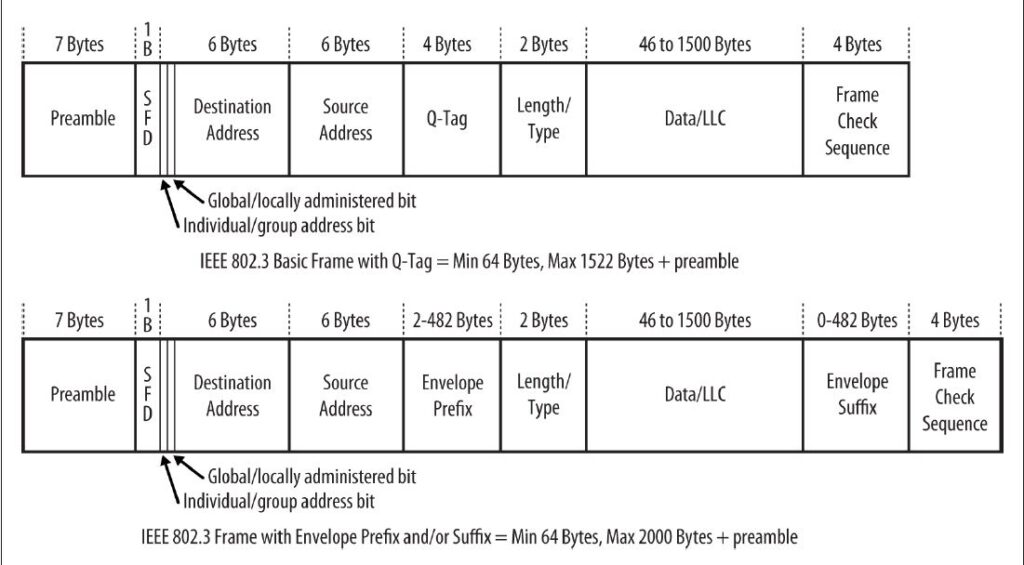
The Q-tag is so called because it carries an 802.1Q tag, also known as a VLAN or priority tag. The 802.1Q standard defines a virtual LAN (VLAN) as one or more switch ports that function as a separate and independent Ethernet system on a switch. Ethernet traffic within a given VLAN (e.g., VLAN 100) will be sent and received only on those ports of the switch that are defined to be members of that particular VLAN (in this case, VLAN 100). A 4-byte-long Q-tag is inserted in an Ethernet frame between the source address and the length/type field to identify the VLAN to which the frame belongs. When a Q- Tag is present, the minimum data field size is reduced to 42 bytes, maintaining a min‐ imum frame size of 64 bytes.
Switches can be connected together with an Ethernet segment that functions as a trunk connection that carries Ethernet frames with VLAN tags in them. That, in turn, makes it possible for Ethernet frames belonging to VLAN 100, for example, to be carried be‐ tween multiple switches and sent or received on switch ports that are assigned to VLAN 100.
VLAN tagging, a vendor innovation, was originally accomplished using a variety of proprietary approaches. Development of the IEEE 802.1Q standard for virtual bridged LANs produced the VLAN tag as a vendor-neutral mechanism for identifying which VLAN a frame belongs to.
The addition of the 4-byte VLAN tag causes the maximum size of an Ethernet frame to be extended from the original maximum of 1,518 bytes (not including the preamble) to a new maximum of 1,522 bytes. Because VLAN tags are only added to Ethernet frames by switches and other devices that have been programmed to send and receive VLAN- tagged frames, this does not affect traditional, or “classic,” Ethernet operation.
The first two bytes of the Q-tag contain an Ethernet type identifier of 0x8100. If an Ethernet station that is not programmed to send or receive a VLAN tagged frame hap‐ pens to receive a tagged frame, it will see what looks like a type identifier for an unknown protocol type and simply discard the frame.
Envelope Prefix and Suffix
As networks grew in complexity and features, the IEEE received requests for more tags to achieve new goals. The VLAN tag provided space for a VLAN ID and Class of Service (CoS) bits, but vendors and standards groups wanted to add extra tags to support new bridging features and other schemes.
To accommodate these requests, the 802.3 standards engineers defined an “envelope frame,” which adds an extra 482 bytes to the maximum frame size. The envelope frame was specified in the 802.3as supplement to the standard, adopted in 2006. In another change, the tag data was added to the data field to produce a MAC Client Data field. Because the MAC client data field includes the tagging fields, it may seem like the frame size definition has changed, but in fact this is just a way of referring to the combination of tag data and the data field for the purpose of defining the envelope frame.
The 802.3as supplement modified the standard to state that an Ethernet implementation should support at least one of three maximum MAC client data field sizes. The data field size continues to be defined as 46 to 1,500 bytes, but to that is added the tagging infor‐ mation to create the MAC client data field, resulting in the following MAC client data field sizes:
- 1,500-byte “basic frames” (no tagging information)1,982-byte “envelope frames” (1,500-byte data field plus 482 bytes for all tags)
- 1,504-byte “Q-tagged frames” (1,500-byte data field plus 4-byte tag)
The contents of the tag space are not defined in the Ethernet standard, allowing maxi‐ mum flexibility for the other standards to provide tags in Ethernet frames. Either or both prefix and suffix tags can be used in a given frame, occupying a maximum tag space of 482 bytes if either or both are present. This can result in a maximum frame size of 2,000 bytes.
The latest standard simply includes the Q-tag as one of the tags that can be carried in an envelope prefix. The standard notes, “All Q-tagged frames are envelope frames, but not all envelope frames are Q-tagged frames.” In other words, you can use the envelope space for any kind of tagging, and if you use a Q-tag, then it is carried in the envelope prefix as defined in the latest standard. An envelope frame carrying a Q-tag will have a minimum data size of 42 bytes, preserving the minimum frame size of 64 bytes.
Tagged frames are typically sent between switch ports that have been configured to add and remove tags as necessary to achieve their goals. Those goals can include VLAN operations and tagging a frame as a member of a given VLAN, or more complex tagging schemes to provide information for use by higher-level switching and routing protocols. Normal stations typically send basic Ethernet frames without tags, and will drop tagged frames that they are not configured to accept.
Type or Length Field
The old DIX standard and the IEEE standard implement the type and/or length fields differently:
DIX standard
In the DIX Ethernet standard, this 16-bit field is called a type field, and it always contains an identifier that refers to the type of high-level protocol data being carried in the data field of the Ethernet frame. For example, the hexadecimal value 0x0800 has been assigned as the identifier for the Internet Protocol (IP). A DIX frame being used to carry an IP packet is sent with the value of 0x0800 in the type field of the frame. All IP packets are carried in frames with this value in the type field.
IEEE standard
When the IEEE 802.3 standard was first published in 1985, the type field was not included, and instead the IEEE specifications called this field a length field. Type fields were added to the IEEE 802.3 standard in 1997, so the use of a type field in the frame is officially recognized in 802.3. This change simply made the common practice of using the type field an official part of the standard. The identifiers used in the type field were originally assigned and maintained by Xerox, but with the type field now part of the IEEE standard, the responsibility for assigning type num‐ bers was transferred to the IEEE.
In the IEEE 802.3 standard, this field is called a length/type field, and the hexadecimal value in the field indicates the manner in which the field is being used. The first octet of the field is considered the most significant octet in terms of numeric value.
If the value in this field is numerically less than or equal to 1,500 (decimal), then the field is being used as a length field. In that case, the value in the field indicates the number of logical link control (LLC) data octets that follow in the data field of the frame. If the number of LLC octets is less than the minimum required for the data field of the frame, then octets of padding data will automatically be added to make the data field large enough. The content of the padding data is unspecified by the standard. Upon reception of the frame, the length field is used to determine the length of valid data in the data field, and the padding data is discarded.
If the value in this field of the frame is numerically greater than or equal to 1,536 decimal (0x600 hex), then the field is being used as a type field.The range of 1,501 to 1,535 was intentionally left undefined in the standard.
In that case, the hexadecimal identifier in the field is used to indicate the type of protocol data being carried in the data field of the frame. The network software on the station is responsible for providing any padding data required to ensure that the data field is 46 bytes in length. With this method, there is no conflict or ambiguity about whether the field indicates length or type.
Data Field
Next comes the data field of the frame, which is also treated differently in the two standards:
DIX standard
In a DIX frame, this field must contain a minimum of 46 bytes of data, and may range up to a maximum of 1,500 bytes of data. The network protocol software is expected to provide at least 46 bytes of data.
IEEE standard
The total size of the data field in an IEEE 802.3 frame is the same as in a DIX frame: a minimum of 46 bytes and a maximum of 1,500. However, a logical link control protocol defined in the IEEE 802.2 LLC standard may ride in the data field of the 802.3 frame to provide control information. The LLC protocol is also used as a way to identify the type of protocol data being carried by the frame if the type/length field is used for length information. The LLC protocol data unit (PDU) is carried in the first set of bytes in the data field of the IEEE frame. The structure of the LLC PDU is defined in the IEEE 802.2 LLC standard.
The process of figuring out which protocol software stack gets the data in an incoming frame is known as demultiplexing. An Ethernet frame may use the type field to identify the high-level protocol data being carried by the frame. In the LLC specification, the receiving station demultiplexes the frame by deciphering the contents of the logical link control protocol data unit.
FCS Field
The last field in both the DIX and IEEE frames is the frame check sequence (FCS) field, also called the cyclic redundancy check (CRC). This 32-bit field contains a value that is used to check the integrity of the various bits in the frame fields (not including the preamble/SFD). This value is computed using the CRC, a polynomial that is calculated using the contents of the destination, source, type (or length), and data fields. As the frame is generated by the transmitting station, the CRC value is simultaneously being calculated. The 32 bits of the CRC value that are the result of this calculation are placed in the FCS field as the frame is sent. The x31 coefficient of the CRC polynomial is sent as the first bit of the field, and the x0 coefficient as the last.
The CRC is calculated again by the interface in the receiving station as the frame is read in. The result of this second calculation is compared with the value sent in the FCS field by the originating station. If the two values are identical, then the receiving station is provided with a high level of assurance that no errors have occurred during transmission over the Ethernet channel. If the values are not identical, then the interface can discard the frame and increment the frame error counter.
End of Frame Detection
The presence of a signal on the Ethernet channel is known as carrier. The transmitting interface stops sending data after the last bit of a frame is transmitted, which causes the Ethernet channel to become idle. In the original 10 Mb/s system, the loss of carrier when the channel goes idle signals to the receiving interface that the frame has ended. When the interface detects loss of carrier, it knows that the frame transmission has come to an end. The higher-speed Ethernet systems use more complex signal encoding schemes, which have special symbols available for signaling to the interface the start and end of a frame.
A basic frame carrying a maximum data field of 1,500 bytes is actually 1,518 bytes in length (not including the preamble) when the 18 bytes needed for the addresses, length/ type field, and the frame check sequence are included. The addition of a further 482 bytes for envelope frames makes the maximum frame size become 2,000 bytes. This was chosen as a useful maximum frame size that could be handled by a typical Ethernet implementation in an interface or switch port, while providing enough room for current and future prefixes and suffixes.
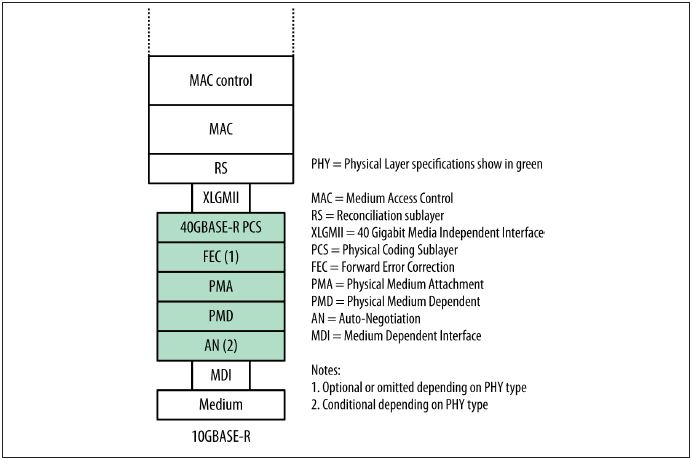







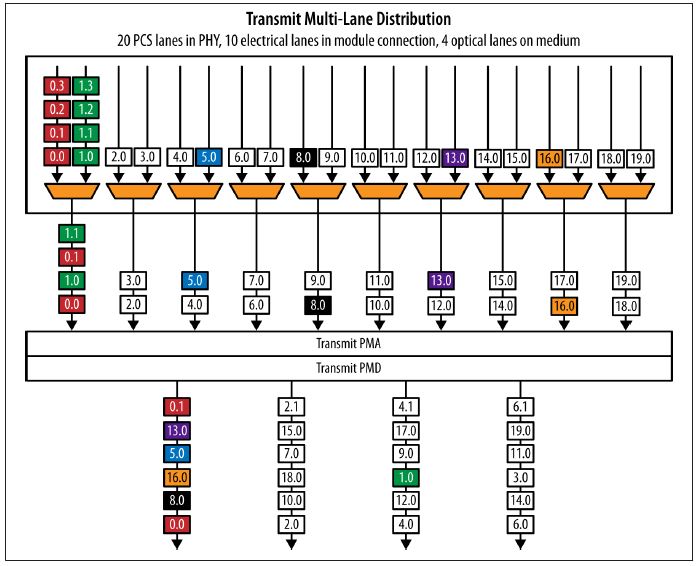
 100 Gb/s multilane transmit operation
100 Gb/s multilane transmit operation
















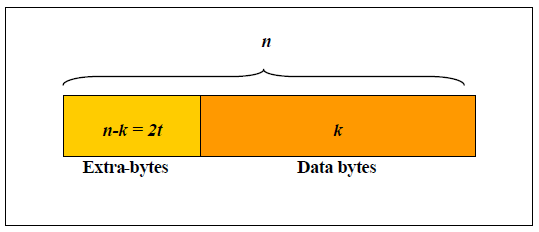
:Exploring “n” and “k” in Reed-Solomon FEC code")

















 Positive Stuffing
Positive Stuffing