
HomePosts tagged “Error detection”
Error detection
Showing 1 - 3 of 3 results
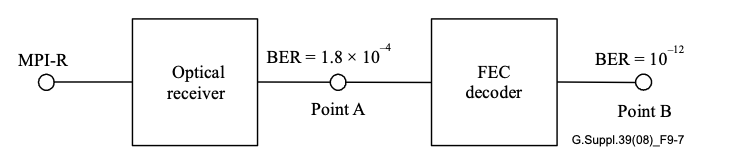
Forward Error Correction (FEC) has become an indispensable tool in modern optical communication, enhancing signal integrity and extending transmission distances....
-
Free
-
March 26, 2025

The ITU standards define a “suspect internal flag” which should indicate if the data contained within a register is ‘suspect’...
-
Free
-
March 26, 2025
When the bit error occurs to the system, generally the OSNR at the transmit end is well and the fault...
-
Free
-
March 26, 2025
Explore Articles
- Analysis
- Automation
- Careers and Learning Paths
- Coherent Optics
- Data Center Interconnect
- Free
- Fundamentals
- Management
- Network Architecture
- Planning & Design
- Premium
- Professional Development
- Security
- Standards
- Submarine and Long-Haul
- Technical
- Testing
- Tools and Simulators
- Trends & News
- Troubleshooting and Operations
- Vendor and Product Landscape
Filter Articles
ResetExplore Courses
Tags
400ZR
automation
behavioral
behavioral interview
ber
candidate
career
COHERENT
coherent optical transmission
coherent optics
data center interconnect
Data transmission
DWDM
edfa
EDFA noise figure
Fiber optics
Fiber optic technology
Forward Error Correction
hiring
Interview
Latency
modulation
network automation
noise figure
optical
Optical communication
Optical fiber
Optical network
optical network automation
optical networking
Optical signal-to-noise ratio
OSNR
OSNR calculation
OTN
preparation
Probabilistic Constellation Shaping
Q-factor
recruiter
ROADM
Signal quality
Slider
spectral efficiency
STAR
submarine
Ticker