Why Receiver Sensitivity is so important for optical module?
For Optical communication to happen, a receiver (essentially a photodetector, either a PIN or APD type) needs a minimum amount of power to distinguish the 0s and 1s from the raw input optical signal.
The minimum power requirement of the receiver is called the receiver sensitivity
The optical power at the receiver end has to be within the dynamic range of the receiver; otherwise, it damages the receiver (if it exceeds the maximum value) or the receiver cannot differentiate between 1s and 0s if the power level is less than the minimum value.
Optical amplifiers alleviate that problem by amplifying all the channels together completely in the optical domain; therefore, optical amplifiers can enhance the transmission distance. So, does that mean that optical amplifiers can increase the amplifying distance as much as they wants? Not really! Amplifiers come at a price and induct a trade off; they enhance the signal power level, but at the same time, they add their own complement of noise. This noise is amplified spontaneous emission (ASE).
The noise is random in nature, and it is accumulated at each amplification stage.
Amplifier noise is a severe problem in system design. A figure of merit here is the optical signal-to-noise ratio (OSNR) requirement of the system. The OSNR specifies the ratio of the net signal power to the net noise power. It is a ratio of two powers; therefore, if a signal and noise are both amplified, system OSNR still tells the quality of the signal by calculating this ratio. System design based on OSNR is an important fundamental design tool.
OSNR is not just limited to optical amplifier-based networks. Other active and passive devices can also add noise and create an OSNR-limited system design problem. Active devices such as lasers and amplifiers add noise. Passive devices such as taps and the fiber can add components of noise. In the calculation of system design, optical amplifier noise is considered the predominant source for OSNR penalty and degradation. That does not imply unimportance to other sources of OSNR penalty.
There have been many efforts to use pilot tones (i.e., small sinusoidal components added to WDM signals) for the monitoring of WDM signals directly in the optical layer. For example, it has been reported that pilot tones could be used to monitor various optical parameters of WDM signals such as optical power, wavelength, and optical signal-to-noise ratio (OSNR), and so on .
The pilot-tone-based techniques could be used to monitor these parameters without the expensive demultiplexing filters (such as tunable optical filter and diffraction grating). Thus this technique could be extremely cost-effective. In addition, this technique is well suited for use in a dynamic WDM network, since the pilot tones are bound to follow their corresponding optical signals anywhere in the network. Thus the optical path of each WDM signal could be monitored simply by tracking its tone frequency
Although the pilot-tone-based monitoring technique has many advantages, it also has some limitations owing to the following problems.
First, the pilot tone could impose unwanted amplitude modulation on the data signal and degrade the receiver sensitivity .
Second, the performance of the pilot-tone-based monitoring technique could be deteriorated by ghost tones caused by cross-gain modulation (XGM) and stimulated Raman scattering (SRS) . These problems could be mitigated by using proper amplitudes and frequencies of pilot tones. However, for use in a long-haul network with a large number of channels, it may still be necessary to restrict the number ofWDM channels to be monitored at a time (by using an optical bandpass filter).
Operating Principle
Figure shows the operating principle of the pilot-tone-based monitoring technique .We assume that an optical signal is transmitted from node A to node C via node B. A small sinusoidal component (i.e., pilot tone) is added to the optical signal at node A. This pilot tone can be extracted at node B by use of a simple electronic circuit and can be used for monitoring various optical parameters such as optical power, wavelength, OSNR, and so on. Pilot tones can also be used to monitor the optical paths of WDM signals even in a dynamically reconfigurable network. This is because once the pilot tone is attached, it is bound to follow the optical signal throughout the network. Thus we can monitor the optical path of each WDM signal simply by tracking its corresponding tone frequency.
For practical applications, pilot tones should be added into and extracted from the optical
Signal stages are cascaded, so powers are multiplied by gain or loss. This yields a lot of multiplications. This suggests the need for a logarithmic representation of power.
A logarithmic scale is used to
Condense wide range of numbers
Ease multiplication
Logarithms
Log(x) = power to which base must be raised to give x. The base is chosen to be 10.
Log(x) = y means that x = 10y
Log(A x B) = Log(A) + Log(B)
Hence: Log(xN) = N x Log(x)
Some example logarithm values:
Log(100) = 2 because 102 = 100.
Log(1000) = 3 because 103 = 1000.
Log(1000000) = 6 because 106 = 1000000.
Log(10) = 1 because anything to the power of 1 is itself.
Log(1) = 0 because anything to the power of 0 is 1.
Log(1/10) = -1 because 10-1 = (1/10)
Log(1/1000) = -3
The deciBel
Represent gains or attenuations logarithmically (base 10) (the Bel)
But to make numbers more convenient, scale by a factor of 10 (the deciBel or dB)
Then, G = 10Log(Pout / Pin) in dB
Examples:
An amplifier has a power gain of 1000. What is this in dB?G = 10Log(1000) = 10 x 3 = 30 dB
An attenuator has its output power 1/10th of its input. What is its transfer function in dB?G = 10Log(1/10) = 10 x -1 = -10 dB. (Note – dB can be negative)
Since Log(A x B) = Log(A) + Log(B) we can add gains and losses.
Because the core of a fiber is made of glass, impurities (such as iron, magnesium, or even water) and irregular structures can cause the light irradiance to decrease, a condition known as attenuation, as the light travels through kilometers of the core. The attenuation factor is well known for all the types of glass used in long-haul fiber-optic cables; you can find it in the fiber manufacturer’s catalog.
The unit decibel describes the ratio of the optical power input into the fiber to the optical power measured at the output of the fiber of some length; it helps gauge attenuation. Power, which is the rate at which the light carries energy, is a more-convenient, more easily measured quantity than irradiance for characterizing the behavior of light in a fiber, so most fiber systems characterize the light-carrying capabilities of fibers by noting the effect on the power.
The decibel is a log base 10 scale, so the number of decibels is equal to –10log(Pout/Pin), which means that for a power ratio of 1/10, the measure is 10 decibels; 1/100 is 20 decibels, 1/1,000 is 30 decibels, and so on.
The equation that tells you how much power you can get out of a fiber of a certain length is In this equation,
✓ Pout is the power of the light exiting the fiber.
✓ Pin is the power input into the fiber
✓ α is the attenuation of the fiber, in units of decibels/kilometer.
✓ L is the length of the fiber, in units of kilometers.
This equation is important for designing a fiber-optic link when sending data over long distances (tens of kilometers) because it helps you plan where you need to place signal amplifiers, called repeaters, in the fiber to make sure that the signal sent is still usable. Flip to the later section “Repeaters” for more on these devices.
The format of the label for SDH and/or SONET TDM-LSR link is: https://docs.google.com/file/d/0BwE3NGerAe3tbXZ0NHhfUHpQbkk/edit?usp=sharing
0 1 2 3
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| S | U | K | L | M |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
For SDH, this is an extension of the numbering scheme defined in
G.707 section 7.3, i.e. the (K, L, M) numbering. For SONET, the same
signaling scheme is used in order to provide easy interworking between
SDH and SONET signaling. For the S field a STS-3 group, which
corresponds with the SDH AUG-1 level is introduce. The U field indicates
the position of the STS-3c-SPE or STS-1-SPE within the STS-3 group
1. S is the index of a particular AUG-1/STS-3 group. S=1->N
indicates a specific AUG-1/STS-3 group inside an STM-N/STS-3xN
multiplex. For example, S=1 indicates the first AUG-1/STS-3 group,
and S=N indicates the last AUG-1/STS-3 group of this multiplex.
S is not significant for STM-0/STS-1.
2. U indicates a specific VC/STS-SPE inside a given AUG-1/STS-3
group or STM-0/STS-1. U=1 indicates a single VC-4/STS-3c-SPE in a
AUG-1/STS-3 group or the single VC-3/STS-1-SPE in a STM-0/STS-1, while U=2->4
indicates a specific VC-3/STS-1-SPE inside the given AUG-1/STS-3
group.
3. K is only significant for VC-4/STS-3c and must be ignored for
higher order VC-3/STS-1-SPE. For SDH it indicates a specific branch of a VC-4.
K=1 indicates that the VC-4 is not further subdivided and
contains a C-4. K=2->4 indicates a specific TUG-3 inside the VC-4.
For a SONET STS-3c-SPE it is fixed to K=1 as SONET doesn’t support
substructured STS-3c-SPE.
4. L indicates a specific branch of a TUG-3, VC-3 or STS-1 SPE.
It is not significant for an unstructured VC-4/STS-3c-SPE. L=1
indicates that the TUG-3/VC-3/STS-1 SPE is not further
subdivided and contains a VC-3/C-3 in SDH or the equivalent in
SONET. L=2->8 indicates a specific TUG-2/VT Group inside the
corresponding higher order signal.
5. M indicates a specific branch of a TUG-2/VT Group. It is not
significant for an unstructured VC-4, STS-3c-SPE, TUG-3, VC-3 or STS-1 SPE.
M=1 indicates that the TUG-2/VT Group is not further subdivided
and contains a VC-2/VT-6 SPE. M=2->3 indicates a specific VT-3
inside the corresponding VT Group, these values MUST NOT be used
for SDH since there is no equivalent of VT-3 with SDH. M=4->6
indicates a specific VC-12/VT-2 SPE inside the corresponding
TUG-2/VT Group. M=7->10 indicates a specific VC-11/VT-1.5 SPE
inside the corresponding TUG-2/VT Group. Note that M=0 denotes
an unstructured VC-4, VC-3 or STS-1 SPE (easy for debugging).
The M encoding is summarized in the following table:
In case of contiguous concatenation, the label that is used is the
lowest label of the contiguously concatenated signal as explained
before. The higher part of the label indicates where the signal
starts and the lowest part is not significant. For instance, when
requesting an VC-4-16c the label is S>0, U=0, K=0, L=0, M=0.
Examples of labels:
Example 1: S>0, U=1, K=1, L=0, M=0
Denotes the unstructured VC-4/STS-3c-SPE of the Sth AUG-1/STS-3 group.
Example 2: S>0, U=1, K>1, L=1, M=0
Denotes the unstructured VC-3 of the Kth-1 TUG-3 of the Sth AUG-1.
Example 3: S>0, U>1, K=0, L=1, M=0
Denotes the Uth unstructured VC-3/STS-1 SPE of the Sth AUG-1/STS-3 group.
Example 4: S>0, U>1, K=0, L>1, M=1
Denotes the VC-2/VT-6 in the Lth-1 TUG2/VT Group in the Uth VC-3/STS-1 SPE of the Sth AUG-1/STS-3 group.
Example 5: S>0, U>1, K=0, L>1, M=9
Denotes the 3rd VC-11/VT-1.5 in the Lth-1 TUG2/VT Group in the Uth VC-3/STS-1 SPE of the Sth AUG-1/STS-3 group.
Example 6: S>0, U=1, K>1, L>1, M=5
Denotes the 2nd VC-12 in the Lth-1 TUG2 in the Kth TUG3 in the VC-4 of the Sth AUG-1.
First North American Fiber-Optic Telecommunications Standard to overcome the limitations of the traditional asynchronous network.
Formulated by the Exchange Carriers Standards Association for the American National Standards Institute
Incorporated into the Synchronous Digital Hierarchy (SDH) recommendations of the International Telecommunications Union (ITU).
SDH is mostly used outside North America and principally in Europe
Synchronous systems (e. g. SONET) :
— Average frequency of all clocks in the system are same or nearly—Clocking provided by a highly stable reference supply
—Allows many STS- 1s to be stacked together without of bit- stuffing
—STS- 1s as well as VTs easily accessed from higher rates signals
—Pointers accommodate differences in reference source frequencies, and phase wander
STS-1: Synchronous Transport Signal – level 1
STM-1: Synchronous Transport Module – level 1
The telecommunications industry adopted the Synchronous Optical Network (SONET) or Synchronous Digital Hierarchy (SDH) standard for optical transport of TDM data. SONET, used in North America, and SDH, used elsewhere, are two closely related standards that specify interface parameters, rates, framing formats, multiplexing methods and management for synchronous TDMover fiber.
SONET/SDH takes “n” bit streams, multiplexes them and optically modulates the signal, sending it out using a light emitting device over fiber with a bit rate equal to (incoming bit rate) multiplied by “n.” Traffic arriving at the SONET/SDH multiplexer from four places at 2.5 Gigabits per second will go out as a single stream at 4 times 2.5 Gigabits per second, or 10 Gigabits per second.
SONET/SDH DigitalHierarchy
Optical Level
SONET
Electrical Level
SDH
Equivalent
Line Rate (Mbps)
Payload Rate (Mbps)
Overhead Rate (Mbps)
SONET
Capacity
SDH
Capacity
OC-1
STS-1
–
51.840
50.112
1.728
28 DS-1sor
1 DS-3
21 E1s
OC-3
STS-3
STM-1
155.520
150.336
5.184
84 DS-1sor
3 DS–3s
63 E1s or
1 E4
OC–12
STS–12
STM-4
622.080
601.344
20.736
336 DS-1s or
12 DS–3s
252 E1s or
4 E4s
OC–48
STS–48
STM-16
2488.320
2405.376
82.944
1,344 DS-1s or
192 DS-3s
1,008E1s or
16 E4s
OC-192
STS-192
STM-64
9953.280
9621.504
331.776
5,376 DS-1s or
192 DS-3s
4,032E1s or
64 E4s
AlthoughanSDH STM–1 has thesamebit rate as the SONETSTS-3,the two signals containdifferent frame structures.
STM= SynchronousTransportModule (ITU–T) STS= Synchronous Transfer Signal (ANSI) OC =OpticalCarrier (ANSI)
The following table lists all of the known ITU-T Recommendations specifically related to the OTN Transport Plane.
Topic
Title
Publ.*
Definitions
G.870 Definitions and Terminology for Optical Transport Networks (OTN
2004
Framework for Recommendations
G.871/Y.1301 Framework for Optical Transport Network Recommendations
10/00
Architectural Aspects
G.872 Architecture of Optical Transport Networks
11/01
G.872 Amend. 1 Architecture of Optical Transport Networks
12/03
G.872 Living List
Control Plane
ASTN/ASON recommendations are moved to specific ASTN/ASON standards page
Structures Mapping
G.709/Y.1331 Network node interface for the optical transport network (OTN)
03/03
G.709/Y.1331 Addendum 1
12/03
G.709 Living List
G.975 Forward Error Correction
10/00
Functional Characteristics
G.681 Functional characteristics of interoffice long-haul line systems using optical amplifiers, including optical multiplexing
10/96
G.798 Characteristics of optical transport network (OTN) equipment functional blocks
01/02
G.798 Amendment 1
06/02
G.798 Living List
G.806 Characteristics of transport equipment – Description Methodology and Generic Functionality
10/00
G.7710/Y.1701 Common Equipment Management Requirements
11/01
Protection Switching
G.808.1 (G.gps) Generic protection switching – Linear trail and subnetwork protection
12/03
G.873.1 Optical Transport network (OTN) – Linear Protection
03/03
G.873.1 Errata 1 Optical Transport network (OTN) – Linear Protection
10/03
Management Aspects
G.874 Management aspects of the optical transport network element
11/01
G.874.1 Optical Transport Network (OTN) Protocol-Neutral Management Information Model For The Network Element View
01/02
G.875 Optical Transport Network (OTN) management information model for the network element view
Data Communication Network (DCN)
G.7712/Y.1703 Architecture and specification of data communication network
03/03
G.dcn living list
Error Performance
G.8201 (G.optperf) Error performance parameters and objectives for multi-operator international paths within the Optical Transport Network (OTN)
09/03
G.optperf living list
M.2401 (M.24otn) Error Performance Limits and Procedures for Bringing-Into-Service and Maintenance of multi-operator international paths and sections within Optical Transport Networks
12/03
Jitter & Wander Performance
G.8251(G.otnjit) The control of jitter and wander within the optical transport network (OTN)
11/01
G.8251 Amendment 1 The control of jitter and wander within the optical transport network (OTN)
06/02
G.8251 Corrigendum 1 The control of jitter and wander within the optical transport network (OTN)
06/02
Physical-Layer Aspects
G.664 General Automatic Power Shut-Down Procedures for Optical Transport Systems
06/99
G.691 Optical Interfaces for single-channel SDH systems with Optical Amplifiers, and STM-64 and STM-256 systems
10/00
G.692 Optical Interfaces for Multichannel Systems with Optical Amplifiers
10/98
G.693 Optical interfaces for intra-office systems
11/01
G.694.1 Spectral grids for WDM applications: DWDM frequency grid
06/02
G.694.2 Spectral grids for WDM applications: CWDM wavelength grid
06/02
G.695 Optical interfaces for Coarse Wavelength Division Multiplexing applications
2003
G.696.1(G.IaDI) Intra-Domain DWDM applications
2004
G.697(G.optmon) Optical monitoring for DWDM system
2004
G.959.1 Optical Transport Networking Physical Layer Interfaces
02/01
Sup.39 (Sup.dsn) Optical System Design and Engineering Considerations
2003
Fibres
G.651 Characteristics of a 50/125 um multipmode graded index optical fibre cable
02/98
G.652 Characteristics of a single-mode optical fibre cable
03/03
G.653 Characteristics of a dispersion-shifted single mode optical fibre cable
12/03
G.654 Characteristics of a cut-off shifted single-mode fibre cable
06/02
G.655 Characteristics of a non-zero dispersion shifted single-mode optical fibre cable
03/03
Components & Sub-systems
G.661 Definition and test methods for the relevant generic parameters of optical amplifier devices and subsystems
10/98
G.662 Generic characteristics of optical fibre amplifier devices and subsystems
10/98
G.663 Application related aspects of optical fibre amplifier devices and sub-systems
04/00
G.671 Transmission characteristics of passive optical components
The Optical Transport Hierarchy (OTH) is a new transport technology for the OTN developed by the ITU. It is based on the network architecture defined in ITU G.872 “Architecture for the Optical Transport Network (OTN)”.
G.872 defines an architecture that is composed of the Optical Channel (OCh), Optical Multiplex Section (OMS) and Optical Transmission Section (OTS). It then describes the functionality that is needed to make OTN work. However, it may be interesting to note the decision made during G.872 development:
“During the development of ITU-T Rec. G.709, (implementation of the Optical Channel Layer according to ITU-T Rec. G.872 requirements), it was realized that the only techniques presently available that could meet the requirements for associated OCh trace, as well as providing an accurate assessment of the quality of a digital client signal, were digital techniques….”
“For this reason ITU-T Rec. G.709 chose to implement the Optical Channel by means of a digital framed signal with digital overhead that supports the management requirements for the OCh. Furthermore this allows the use of Forward Error Correction for enhanced system performance. This results in the introduction of two digital layer networks, the ODU and OTU. The intention is that all client signals would be mapped into the Optical Channel via the ODU and OTU layer networks.”
Currently there are no physical implementations of the OCh, OMS and OTS layers. As they are defined and implemented, they will be included in this document.
The optical channel layer is further structured in layer networks in order to support the network management and supervision functionalities:
The optical channel with full (OCh) or reduced functionality (OChr), which provides transparent network connections between 3R regeneration points in the OTN.
The optical channel transport unit (OTUk/OTUkV) which provides supervision and conditions the signal for transport between 3R regeneration points in the OTN.
The optical channel data unit (ODUk) which provides:
tandem connection monitoring (ODUkT)
end-to-end path supervision (ODUkP)
adaptation of client signals via the optical channel payload unit (OPUk)
adaptation of OTN ODUk signals via the optical channel payload unit (OPUk)
Figure 2 Principal information containment relationships
The following layers are defined in OTN:
OPUk: Optical channel payload unit k (k = 0, 1, 2, 3, 4)
ODUk: Optical channel data unit k (k = 0, 1, 2, 3, 4)
OTUk: Optical channel transport unit k (k = 1, 2, 3, 4)
OCh: Optical channel, a single wavelength
OMSn: Optical multiplex section of order n (Capacities for n = 0 and n = 16 are defined)
OTSn: Optical transmission section of order n (Capacities for n = 0 and n = 16 are defined)
OTM-n.m: Optical transport module of rate m with n optical channels. Possible values for m are:
1: 2.5 Gb/s
2: 10 Gb/s
3: 40 Gb/s
4: 100 Gb/s
Figure 3 shows how they are being used in a network.
Figure 3 OTN Network Layers
However for all intents and purposes there are only 4 layers
Figure 4 OTN Hierarchy
The OPUk, ODUk, and OTUk are in the electrical domain. The OCh is in the optical domain. There are more layers in the optical domain than just the OCh, but they are not being used now.
Figure 5 shows the relationship between various information structure elements and illustrates the multiplexing structure and mappings (including wavelength and time division multiplexing) for the OTM-n.
Figure 5 OTM multiplexing and mapping structure
The OTS, OMS, OCh and COMMS overhead is inserted into the OOS.
The OPUk encapsulates the Client signal (e.g. SDH) and does any rate justification that is needed. It is analogous to the path layer in SDH in that it is mapped at the source, de-mapped at the sink, and not modified by the network.
The OPUk is mapped into an ODUk. The ODUk performs similar functions as the path overhead in SDH.
The ODUk is mapped into an OTUk[V]. The OTUk[V] contains the FEC and performs similar functions as the section overhead in SDH.
After the FEC are added, the signal is then sent to a serializer/ deserializer to be converted to the optical domain. The OTUk[V] is mapped into an OCh[r] and the OCh[r] is then modulated onto an OCC[r].
Up to n (n ≥ 1) OCC[r] are multiplexed into an OCG-n[r].m using wavelength division multiplexing. The OCC[r] tributary slots of the OCG-n[r].m can be of different size.
The OCG-n[r].m is transported via the OTM-n[r].m. For the case of the full functionality OTM-n.m interfaces the OSC is multiplexed into the OTM-n.m using wavelength division multiplexing.
Figure 6 and Figure 7 show the relationship between various information structure elements and illustrate the multiplexing structure and mappings (including wavelength and time division multiplexing) for the OTM-n. In the multi-domain OTN any combination of the ODUk multiplexing layers may be present at a given OTN interface.
Figure 6 shows that a (non-OTN) client signal is mapped into a lower order OPU, identified as “OPU (L)”. The OPU (L) signal is mapped into the associated lower order ODU, identified as “ODU (L)”. The ODU (L) signal is either mapped into the associated OTU[V] signal, or into an ODTU. The ODTU signal is multiplexed into an ODTU Group (ODTUG). The ODTUG signal is mapped into a higher order OPU, identified as “OPU (H)”. The OPU (H) signal is mapped into the associated higher order ODU, identified as “ODU (H)”. The ODU (H) signal is mapped into the associated OTU[V].
The OPU (L) and OPU (H) are the same information structures, but with different client signals. The concepts of lower order and high order ODU are specific to the role that ODU plays within a single domain.
Figure 6 OTM multiplexing and mapping structure
Figure 7 shows that an OTU[V] signal is mapped either into an optical channel signal, identified as OCh and OChr, or into an OTLk.n. The OCh/OChr signal is mapped into an optical channel carrier, identified as OCC and OCCr. The OCC/OCCr signal is multiplexed into an OCC group, identified as OCG-n.m and OCG-nr.m. The OCG-n.m signal is mapped into an OMSn. The OMSn signal is mapped into an OTSn. The OTSn signal is presented at the OTM-n.m interface.
The OCGnr.m signal is mapped into an OPSn. The OPSn signal is presented at the OTM-nr.m interface.
A single OCCr signal is mapped into an OPS0. The OPS0 signal is presented at the OTM-0.m interface. The OTLk.n signal is mapped into an optical transport lane carrier, identified as OTLC. The OTLC signal is multiplexed into an OTLC group, identified as OTLCG. The OTLCG signal is mapped into an OPSMnk. The OPSMnk signal is presented at the OTM-0.mvn interface.
The OPUk (k = 1,2,3) frame structure is organized in an octet-based block frame structure with 4 rows and 3810 columns.
Figure 9 OPUk frame structure
The two main areas of the OPUk frame are:
OPUk overhead area
OPUk payload area
Columns 15 to 16 of the OPUk are dedicated to OPUk overhead area.
Columns 17 to 3824 of the OPUk are dedicated to OPUk payload area.
NOTE – OPUk column numbers are derived from the OPUk columns in the ODUk frame
OPUk OH information is added to the OPUk information payload to create an OPUk. It includes information to support the adaptation of client signals. The OPUk OH is terminated where the OPUk is assembled and disassembled.
The 256-byte PSI signal is aligned with the ODUk multi-frame (i.e. PSI[0] is present at ODUk multi-frame position 0000 0000, PSI[1] at position 0000 0001, PSI[2] at position 0000 0010, etc.).
PSI[0] contains a one-byte payload type. PSI[1] to PSI[255] are mapping and concatenation specific.
The ODUk (k = 1,2,3) frame structure is organized in an octet-based block frame structure with 4 rows and 3824 columns.
Figure 11 ODUk frame structure
The three main areas of the ODUk frame are:
OTUk area
ODUk overhead area;
OPUk area.
Columns 1 to 14 of rows 2-4 are dedicated to ODUk overhead area.
Columns 1 to 14 of row 1 are reserved for frame alignment and OTUk specific overhead.
Columns 15 to 3824 of the ODUk are dedicated to OPUk area.
ODUk OH information is added to the ODUk information payload to create an ODUk. It includes information for maintenance and operational functions to support optical channels. The ODUk OH consists of portions dedicated to the end-to-end ODUk path and to 6 levels of tandem connection monitoring. The ODUk path OH is terminated where the ODUk is assembled and disassembled. The TC OH is added and terminated at the source and sink of the corresponding tandem connections, respectively.
The TTI is a 64-Byte signal that occupies one byte of the frame and is aligned with the OTUk multi-frame. It is transmitted 4 times per multi-frame.
5.2.1.2 BIP-8
This byte provides a bit interleaved parity-8 (BIP-8) code.
The ODUk BIP-8 is computed over the bits in the OPUk (columns 15 to 3824) area of ODUk frame i, and inserted in the ODUk PM BIP-8 overhead location in the ODUk frame i+2.
5.2.1.3 Backward Defect Indication (BDI)
This is defined to convey the “Signal Fail” status detected at the path terminating sink function, to the upstream node.
5.2.1.4 Backward Error Indication and Backward Incoming Alignment Error (BEI/BIAE)
This signal is used to convey in the upstream direction the count of interleaved-bit blocks that have been detected in error by the corresponding ODUk path monitoring sink using the BIP-8 code. This count has nine legal values, namely 0-8 errors. The remaining seven possible values represented by these 4 bits can only result from some unrelated condition and are interpreted as 0 errors.
5.2.1.5 Path Monitoring Status (STAT)
They indicate the presence of a maintenance signal.
There are 6 TCM’s. They can be nested or overlapping.
Figure 14 ODUk tandem connection monitoring #i overhead
5.2.2.1 Trail Trace Identifier (TTI)
The TTI is a 64-Byte signal that occupies one byte of the frame and is aligned with the OTUk multi-frame. It is transmitted four times per multi-frame.
5.2.2.2 BIP-8
This byte provides a bit interleaved parity-8 (BIP-8) code.
Each ODUk BIP-8 is computed over the bits in the OPUk (columns 15 to 3824) area of ODUk frame i, and inserted in the ODUk TCM BIP-8 overhead location (associated with the tandem connection monitoring level) in ODUk frame i+2.
The BIP-8 is only overwritten at the start of a Tandem Connection. Any existing TCM is not overwritten.
5.2.2.3 Backward Defect Indication (BDI)
This is defined to convey the “Signal Fail” status detected at the path terminating sink function, to the upstream node.
5.2.2.4 Backward Error Indication and Backward Incoming Alignment Error (BEI/BIAE)
This signal is used to convey in the upstream direction the count of interleaved-bit blocks that have been detected as being in error by the corresponding ODUk tandem connection monitoring sink using the BIP-8 code. It is also used to convey in the upstream direction an incoming alignment error (IAE) condition that is detected in the corresponding ODUk tandem connection monitoring sink in the IAE overhead.
During an IAE condition the code “1011” is inserted into the BEI/BIAE field and the error count is ignored. Otherwise the error count (0-8) is inserted into the BEI/BIAE field. The remaining 6 possible values represented by these 4 bits can only result from some unrelated condition and are interpreted as 0 errors and BIAE not active.
5.2.2.5 TCM Monitoring Status (STAT)
For each tandem connection monitoring field three bits are defined as status bits (STAT). They indicate the presence of a maintenance signal (if there is an incoming alignment error at the source TCM, or if there is no source TCM active).
5.2.2.6 Tandem Connection Monitoring ACTivation/deactivation (TCM-ACT)
Two fields of two bytes are allocated in the ODUk overhead to support two general communications channels between any two network elements with access to the ODUk frame structure (i.e., at 3R regeneration points). These are clear channels. The bytes for GCC1 are located in row 4, columns 1 and 2, and the bytes for GCC2 are located in row 4, columns 3 and 4 of the ODUk overhead.
Up to 8 levels of nested APS/PCC signals may be present in this field. The APS/PCC bytes in a given frame are assigned to a dedicated level depending on the value of MFAS as follows:
MFAS bit 678
APS/PCC channel applies to connection level
Protection scheme using the APS/PCC channel
000
ODUk Path
ODUk SNC/N
001
ODUk TCM1
ODUk SNC/S, ODUk SNC/N
010
ODUk TCM2
ODUk SNC/S, ODUk SNC/N
011
ODUk TCM3
ODUk SNC/S, ODUk SNC/N
100
ODUk TCM4
ODUk SNC/S, ODUk SNC/N
101
ODUk TCM5
ODUk SNC/S, ODUk SNC/N
110
ODUk TCM6
ODUk SNC/S, ODUk SNC/N
111
OTUk Section
ODUk SNC/I
Table 4 Multi-frame to allow separate APS/PCC for each monitoring level
For linear protection schemes, the bit assignments for these bytes and the bit-oriented protocol are given in ITU-T Recommendation G.873.1. Bit assignment and byte oriented protocol for ring protection schemes are for further study.
One byte is allocated in the ODUk overhead to transport a 256-byte fault type and fault location (FTFL) message. The byte is located in row 2, column 14 of the ODUk overhead.
The OTUk (k = 1,2,3) frame structure is based on the ODUk frame structure and extends it with a forward error correction (FEC). 256 columns are added to the ODUk frame for the FEC and the overhead bytes in row 1, columns 8 to 14 of the ODUk overhead are used for OTUk specific overhead, resulting in an octet-based block frame structure with 4 rows and 4080 columns.
The OTUk forward error correction (FEC) contains the Reed-Solomon RS(255,239) FEC codes. If no FEC is used, fixed stuff bytes (all-0s pattern) are inserted.
OTUk OH information is part of the OTUk signal structure. It includes information for operational functions to support the transport via one or more optical channel connections. The OTUk OH is terminated where the OTUk signal is assembled and disassembled.
The OTUk signal needs sufficient bit timing content to allow a clock to be recovered. A suitable bit pattern, which prevents a long sequence of “1”s or “0”s, is provided by using a scrambler.
The operation of the scrambler is functionally identical to that of a frame synchronous scrambler of sequence length 65535 operating at the OTUk rate.
The generating polynomial is 1 + x + x3+ x12 + x16.
The scrambler is reset to “FFFF” (HEX) on the most significant bit of the byte following the last framing byte in the OTUk frame, i.e. the MSB of the MFAS byte. This bit and all subsequent bits to be scrambled are added modulo 2 to the output from the x16 position of the scrambler. The scrambler runs continuously throughout the complete OTUk frame. The framing bytes (FAS) of the OTUk overhead are not scrambled.
Scrambling is performed after FEC check bytes computation and insertion into the OTUk signal.
A 6 byte OTUk-FAS signal is defined in row 1, columns 1 to 6 of the OTUk overhead.
OA1 is “1111 0110”. OA2 is “0010 1000”.
Figure 17 Frame alignment signal overhead structure
5.3.2.2 Multi-Frame Alignment Signal (MFAS)
Some of the OTUk and ODUk overhead signals span multiple OTUk/ODUk frames. A single multi-frame alignment signal (MFAS) byte is defined in row 1, column 7 of the OTUk/ODUk overhead The value of the MFAS byte will be incremented each OTUk/ODUk frame and provides as such a 256 frame multi-frame.
Individual OTUk/ODUk overhead signals use this central multi-frame to lock their 2-frame, 4-frame, 8-frame, 16-frame, 32-frame, etc. multi-frames to the principal frame.
The TTI is a 64-Byte signal that occupies one byte of the frame and is aligned with the OTUk multi-frame. It is transmitted four times per multi-frame.
5.3.3.2 BIP-8
This byte provides a bit interleaved parity-8 (BIP-8) code.
The OTUk BIP-8 is computed over the bits in the OPUk (columns 15 to 3824) area of OTUk frame i, and inserted in the OTUk BIP-8 overhead location in OTUk frame i+2.
Note: The OPUk includes the Justification Bytes, thus an OTN signal can not be retimed without de-mapping back to the client signal.
5.3.3.3 Backward Defect Indication (BDI)
This is defined to convey the “Signal Fail” Status detected at the Section Terminating Sink Function, to the upstream node.
5.3.3.4 Backward Error Indication and Backward Incoming Alignment Error (BEI/BIAE)
This signal is used to convey in the upstream direction the count of interleaved-bit blocks that have been detected in error by the corresponding OTUk section monitoring sink using the BIP-8 code. It is also used to convey in the upstream direction an incoming alignment error (IAE) condition that is detected in the corresponding OTUk section monitoring sink in the IAE overhead.
During a IAE condition the code “1011” is inserted into the BEI/BIAE field and the error count is ignored. Otherwise the error count (0-8) is inserted into the BEI/BIAE field. The remaining six possible values represented by these four bits can only result from some unrelated condition and are interpreted as 0 errors and BIAE not active.
5.3.3.5 Incoming Alignment Error (IAE)
A single-bit incoming alignment error (IAE) signal is defined to allow the ingress point to inform its peer egress point that an alignment error in the incoming signal has been detected.
IAE is set to “1” to indicate a frame alignment error; otherwise it is set to “0”.
The egress point may use this information to suppress the counting of bit errors, which may occur as a result of a frame phase change of the OTUk at the ingress of the section.
Two bytes are allocated in the OTUk overhead to support a general communications channel between OTUk termination points. This is a clear channel. These bytes are located in row 1, columns 11 and 12 of the OTUk overhead.
The OTUk-AIS is a generic-AIS signal. Since the OTUk capacity (130 560 bits) is not an integer multiple of the PN-11 sequence length (2047 bits), the PN-11 sequence may cross an OTUk frame boundary.
The PN-11 sequence is defined by the generating polynomial 1 + x9 + x11.
ODUk-OCI is specified as a repeating “0110 0110” pattern in the entire ODUk signal, excluding the frame alignment overhead (FA OH) and OTUk overhead (OTUk OH).
The presence of ODUk-OCI is detected by monitoring the ODUk STAT bits in the PM and TCMi overhead fields.
The insertion of this is under management control. There is no defect that inserts ODUk-OCI.
ODUk-LCK is specified as a repeating “0101 0101” pattern in the entire ODUk signal, excluding the Frame Alignment overhead (FA OH) and OTUk overhead (OTUk OH).
The presence of ODUk-LCK is detected by monitoring the ODUk STAT bits in the PM and TCMi overhead fields.
The insertion of this is under management control. There is no defect that inserts ODUk-LCK.
The generic-AIS signal is a signal with a 2047-bit polynomial number 11 (PN-11) repeating sequence.
The PN-11 sequence is defined by the generating polynomial 1 + x9 + x11.
During a signal fail condition of the incoming CBR2G5, CBR10G or CBR40G client signal (e.g. in the case of a loss of input signal), this failed incoming signal is replaced by the generic-AIS signal, and is then mapped into the OPUk.
During signal fail condition of the incoming ODUk/OPUk signal (e.g. in the case of an ODUk-AIS, ODUk-LCK, ODUk-OCI condition) the generic-AIS pattern is generated as a replacement signal for the lost CBR2G5, CBR10G or CBR40G signal.Maintenance Signal Insertion
During a signal fail condition of the incoming ODUj client signal (e.g. OTUj-LOF), this failed incoming signal will be replaced by the ODUj-AIS signal. This ODUj-AIS is then mapped into the respective timeslot in the ODUk.
For the case the ODUj is received from the output of a fabric (ODUj connection function), the incoming signal may contain (case of open matrix connection) the ODUj-OCI signal This ODUj-OCI signal is then mapped into the respective timeslot in the ODUk.
Not all equipment will have a real connection function (switch fabric) implemented; instead the presence/absence of tributary interface port units represents the presence/absence of a matrix connection.
If such unit is intentionally absent or not installed, the associated timeslot in the ODUk shall carry an ODUj-OCI signal.
If such unit is installed but temporarily removed as part of a repair action, the associated timeslot in the ODUk shall carry an ODUj-AIS signal.
Default PLM is declared if the accepted payload type (AcPT) is not equal to the expected payload type(s) as defined by the specific adaptation function. Default PLM is cleared if the accepted payload type is equal to the expected payload type(s).
A new payload type PT (AcPT) is accepted if a new consistent value is received in the PSI[0] byte in 3 consecutive multi-frames.
Default MSIM is declared if the accepted MSI (AcMSI) is not equal to the expected multiplex structure identifier (ExMSI). dMSIM is cleared if the AcMSI is equal to the ExMSI. ExMSI is configured via the management interface. A new multiplex structure identifier MSI (AcMSI) is accepted if a new consistent value is received in the MSI bytes of the PSI overhead (PSI[2…5] for ODU2, PSI[2…17] for ODU3) in 3 consecutive multi-frames.
If the frame alignment process is in the out-of-frame (OOF) state for 3 ms, default LOFLOM is declared. To prevent from the case of intermittent OOFs, the integrating timer is reset to 0 until an in-frame (IF) condition persists continuously for 3 ms. Default LOFLOM is cleared when the IF state persists continuously for 3 ms.
The ODUj frame and multi-frame alignment is found by searching for the framing pattern (OA1, OA2 FAS bytes) and checking the multi-frame sequence (MFAS byte) contained in the ODUj frame.
In the out-of-frame state the framing pattern searched for is the full set of the OA1 and OA2 bytes. The in-frame (IF) is entered if this set is found and confirmed one frame period later and an error-free multi-frame sequence is found in the MFAS bytes of the two frames.
In the in-frame state (IF) the frame alignment signal is continuously checked with the presumed frame start position and the expected multi-frame sequence. The framing pattern checked for is the OA1OA2 pattern (bytes 3 and 4 of the first row of the ODUj[/i] frame). The out of frame state (OOF) is entered if this subset is not found at the correct position in 5 consecutive frames or the received MFAS does not match with the expected multi-frame number in 5 consecutive frames.
The frame and multi-frame start are maintained during the OOF state.
OTN is transparent to the payload it transports within the ODUk. The OTN layer does not need to transport network synchronization since network synchronization can be transported within the payload, mainly by SDH client tributaries.
Two types of mapping have been specified for the transport of CBR payload, e.g. SDH.
The first one is the asynchronous mapping, which is the most widely used, where the payload floats within the OTN frame. In this case, there is no frequency relationship between the payload and the OTN frame frequencies, thus simple free running oscillators can be used to generate the OTN frame.
The second is the synchronous mapping where the timing used to generate the OTN frame is extracted from a CBR client tributary, e.g. SDH. In case of LOS of the input client, the OTN frequency that does not transport payload is generated by a free running oscillator, without need for a holdover mode.
This specification allows for very simple implementation of timing in OTN equipments compared to SDH.
An OTN NE does not require synchronization interfaces, complex clocks with holdover mode nor SSM processing. Another difference with SDH is that there is no geographical option for the timing aspects of OTN.
OTN transports client signals into a G.709 frame, OTUk that is transported by an OCh on one lambda of the Optical Transport Module (OTM). Each lambda carries its G.709 frame with its own frequency; there is no common clock for the different OTUk of the OTM.
A trail through OTN is generated in an OTN NE that maps the client into an ODUk and terminated in another OTN NE that de-maps the client signal from the ODUk. Between the 2 OTN trail terminations, there might be 3R regenerators, which are equipments that perform complete regeneration of the pulse shape, clock recovery and retiming within required jitter limits.
The number of 3R regenerators that can be cascaded in tandem depends on the specification of this regenerator and on the jitter and wander generation and tolerance applicable to the OTUk interfaces; it is stated to be at least 50.
ODUk multiplexing has been standardized; its implication on timing has been taken into account in the relevant recommendations.
In an OTN, jitter and wander accumulate on transmission path according to the generation and transfer characteristics of interconnected equipments, 3R regenerators, client mappers, de-mappers and multiplexers, de-multiplexers. In order to avoid the effects of excessive jitter and wander, the ITU-T Recommendation G.8251 recommendation specifies the maximum magnitude of jitter and wander, and the minimum jitter and wanders tolerance, at OTN network interfaces.
The OTN generates and accumulates jitter and wander on its client signals due to the buffers of the mapping into ODUk and due to the ODUk multiplexing. The limits for such accumulation are given in the ITU-T Recommendation G.825 for SDH signal clients.
Jitter and wander is also accumulated on the OTN signals itself due to the ODUk multiplexing and 3R jitter generation. The network limits for this are given in the ITU-T Recommendation G.8251.
The ITU-T Recommendation G.8251 specifies the jitter and wander tolerance. As OTN clocks do not generate wander, no wander limit has been defined for OTN.
The ITU-T Recommendation G.8251 specifies the different type of clocks that are required to perform the following functions: the accuracy of these clocks depends on the definition of the G.709 frame and on the accuracy specified for the clients.
Asynchronous mapping of a client into an ODUk and ODUk multiplexing: this ODCa clock is a free- running clock with a frequency accuracy of ± 20 ppm.
Synchronous mapping of a client into an ODUk: this ODCb clock is locked on the client frequency.
3R regeneration: this ODCr clock is locked on an OCh input frequency which must be within ± 20 ppm.
De-mapping a client signal from an ODUk and ODUk de-multiplexing: this ODCp clock is locked on an OCh input frequency which must be within ± 20 ppm.
The ITU-T Recommendation G.8251 specifies the jitter generation of these clocks and, when applicable, noise tolerance, jitter transfer and transient response.
All these clock functions are used for clock recovery and clock filtering of a particular signal. They never serve as an equipment synchronization source. Therefore there is no holdover mode specified for these clocks since there is no need for an accurate clock when the input signal disappears.
The ITU-T Recommendation G.8251 provides a provisional adaptation of the SDH synchronization reference chain to include OTN islands. This is an amendment of the reference chain being defined in the ITU-T Recommendation G.803. Considering that SDH may be transported by OTN islands, the SEC will no longer be present but replaced by OTN NEs. This leads to the definition of a reference chain where all SECs located between 2 SSUs are replaced by an OTN island. The local part of the reference chain, after the last SSU can still support 20 SECs in tandem. Each of these islands may be composed of OTN NEs performing mapping/de-mapping or multiplexing/de-multiplexing operations. This adaptation of the reference chain raises a buffer size constraint for the OTN NEs in order to keep the overall network wander performance within specified limits. Predominantly the mapping and the de-mapping functions of the OTN contribute to wander accumulation due to the buffers being involved in these functions. The size limit of these buffers is specified in the ITU-T Recommendation G.798. This allows inserting up to 10 mapping/ multiplexing nodes per OTN island. A total of 100 mapping/de-mapping functions can be performed on this synchronization reference chain.
The ITU-T Recommendation G.8251 presents a Hypothetic Reference Model for 3R regenerator jitter accumulation: according to this model, at any OTUk interface the jitter will remain within network limits in a chain of one mapping clock and up to 50 cascaded 3R regenerators plus a de-mapping clock. It reports the results of extensive simulations showing that it is possible to have 50 OTN regenerators without exceeding the network limits of OTUk interfaces, assuming the regenerators comply with the model defined in this Recommendation.
Forward error correction is a major feature of the OTN.
Already SDH has a FEC defined. It uses undefined SOH bytes to transport the FEC check information and is therefore called an in-band FEC. It allows only a limited number of FEC check information, which limits the performance of the FEC.
For the OTN a Reed-Solomon 16 byte-interleaved FEC scheme is defined, which uses 4 x 256 bytes of check information per ODU frame.
Figure 19 Error correction in OTN
According to ITU-T Recommendation G.709, an Reed-Solomon (255, 239) code with a symbol size of 8 is used for FEC. 239 input bytes are encoded in 255 output bytes. This code enables the detection of 2t = (n – k) = 16 errors in a codeword and the correction of t = (n – k)/2 = 8 of them.
FEC has been proven to be effective in OSNR limited systems as well as in dispersion limited systems. As for non-linear effects, reducing the output power leads to OSNR limitations, against which FEC is useful. FEC is less effective against PMD, however.
G.709 defines a stronger Forward Error Correction for OTN that can result in up to 6,2 dB improvement in Signal to Noise Ratio (SNR). Another way of looking at this is that to transmit a signal at a certain Bit Error Rate (BER) with 6,2 dB less power than without such a FEC.
The coding gain provided by the FEC can be used to:
Increase the maximum span length and/or the number of spans, resulting in an extended reach. (Note that this assumes that other impairments like chromatic and polarization mode dispersion are not becoming limiting factors.)
Increase the number of DWDM channels in a DWDM system which is limited by the output power of the amplifiers by decreasing the power per channel and increasing the number of channels. (Note that changes in non-linear effects due to the reduced per channel power have to be taken into account.)
Relax the component parameters (e.g. launched power, eye mask, extinction ratio, noise figures, and filter isolation) for a given link and lower the component costs.
but the most importantly the FEC is an enabler for transparent optical networks:
Transparent optical network elements like OADMs introduce significant optical impairments (e.g. attenuation). The number of transparent optical network elements that can be crossed by an optical path before 3R regeneration is needed is therefore strongly limited. With FEC an optical path can cross more transparent optical network elements.
This allows evolving from today’s point-to-point links to transparent, meshed optical networks with sufficient functionality.
SDH monitoring is divided into section and path monitoring. A problem arises when you have “Carrier’s Carrier” situation where it is required to monitor a segment of the path that passes another carrier network.
Figure 20 Tandem Connection Monitoring
Here Operator A needs to have Operator B carries his signal. However he also needs a way of monitoring the signal as it passes through Operator B’s network. This is what a “Tandem connection” is. It is a layer between Line Monitoring and Path Monitoring. SDH was modified to allow a single Tandem connection. G.709 allows 6.
TCM1 is used by the User to monitor the Quality of Service (QoS) that they see. TCM2 is used by the first operator to monitor their end-to-end QoS. TCM3 is used by the various domains for Intra domain monitoring. Then TCM4 is used for protection monitoring by Operator B.
There is no standard on which TCM is used by whom. The operators have to have an agreement, so that they don’t conflict.
TCM’s also support monitoring of ODUk (G.709 w/o FEC) connections for one or more of the following network applications (refer to ITU-T G.805 and ITU-T G.872):
optical UNI to UNI tandem connection monitoring; monitoring the ODUk connection through the public transport network (from public network ingress network termination to egress network termination);
optical NNI to NNI tandem connection monitoring; monitoring the ODUk connection through the network of a network operator (from operator network ingress network termination to egress network termination);
sub-layer monitoring for linear 1+1, 1:1 and 1:n optical channel sub-network connection protection switching, to determine the signal fail and signal degrade conditions;
sub-layer monitoring for optical channel shared protection ring (SPRING) protection switching, to determine the signal fail and signal degrade conditions;
Monitoring an optical channel tandem connection for the purpose of detecting a signal fail or signal degrade condition in a switched optical channel connection, to initiate automatic restoration of the connection during fault and error conditions in the network;
Monitoring an optical channel tandem connection for, e.g., fault localization or verification of delivered quality of service.
A TCM field is assigned to a monitored connection. The number of monitored connections along an ODUk trail may vary between 0 and 6. Monitored connections can be nested, overlapping and/or cascaded.
Figure 21 ODUk monitored connections
Monitored connections A1-A2/B1-B2/C1-C2 and A1-A2/B3-B4 are nested, while B1-B2/B3-B4 are cascaded.
Overlapping monitored connections are also supported.
G.709 defines the OPUk which can contain the entire SDH signal. This means that one can transport 4 STM-16 signals in one OTU2 and not modify any of the SDH overhead.
Thus the transport of such client signals in the OTN is bit-transparent (i.e. the integrity of the whole client signal is maintained).
It is also timing transparent. The asynchronous mapping mode transfers the input timing (asynchronous mapping client) to the far end (asynchronous de-mapping client).
It is also delay transparent. For example if 4 STM-16 signals are mapped into ODU1’s and then multiplexed into an ODU2, their timing relationship is preserved until they are de-mapped back to ODU1’s.
When SDH was developed, its main purpose was to provide the transport technology for voice services. Two switching levels were therefore defined. A low order switching at VC-12 level supports directly the E1 voice signals and a high order switching level at VC-4 level is used for traffic engineering. Switching levels at higher bit rates were not foreseen.
Over time the line rate increased while the switching rate was fixed. The gap between line rate and switching bit rate widened. Furthermore new services at higher bit rates (IP, Ethernet services) had to be supported.
Contiguous and virtual concatenation were introduce in order to solve part of the services problem as they allow to support services above the standard SDH switching bit rates.
The gap between line or service bit rate and switching bit rate however still exists as even with concatenation switching is performed at the VC-4 level.
For a 4 x 10G to 40G SDH multiplexer this means processing of 256 VC-4. This will result not only in efforts in the equipment hardware, but also in management and operations efforts.
For efficient equipment and network design and operations, switching at higher bit rates has to be introduced.
One could now argue that photonic switching of wavelengths is the solution. But with photonic switching the switching bit rate is bound to the bit rate of the wavelength and as such would be the service. An independent selection for service bit rates and DWDM technology is not possible.
A operator offering 2,5 Gbit/s IP interconnection would need a N x 2G5 DWDM system. When adding 10G services he has to upgrade some of its wavelengths to 10G. This would lead to inefficient network designs.
OTN provides the solution to the problem by placing no restrictions on switching bit rates. As the line rate grows new switching bit rates are added.
An operator can offer services at various bit rates (2G5, 10G …) independent of the bit rate per wavelength using the multiplexing and inverse multiplexing features of the OTN.
>> What is PMD versus Differential Group Delay (DGD)?
Polarization Mode Dispersion (PMD) is the average Differential Group Delay (DGD) one expects to see when measuring an optical fiber.
DGD is the time separation or delay between the two principle polarization modes of the transmission link at the receiver.
DGD is an instantaneous event and varies randomly with wavelength and time. This means that DGD is a statistical parameter, obeys the law of probability theory and thus has uncertainty associated with it.
PMD is the average value of a distribution of a large number of independent DGD measurements.
>> What is fiber PMD versus cable PMD?
Fiber PMD is PMD that is generally measured on spool, while cable PMD would be the PMD of the fibers in a cabled/installed mode.
The spool measurement is not an accurate indicator of cabled and installed PMD. Many studies have found that there is no correlation between the two.
Other measurement techniques such as a Low Mode Coupling (LMC) measurement have been developed to make this correlation. However, LMC is destructive and time consuming and thus, predominately performed on a sampling basis.
Fiber customers should insist on data from the cable manufacturer that establishes this correlation and provides a Link Design Value (LDV) needed for their application.
>> What is a Link Design Value?
Link Design Value (LDV) is a useful design parameter for calculating the worst-case contribution of the fiber toward the overall system PMD of a link.
LDV, also referred to as PMDQ,is a term developed in standard bodies used to evaluate the impact of fiber related PMD where cabled fibers are deployed in concatenated sections. This is, in building a network typically 2-10 km sections of cable are spliced together.
The LDV is the worst case PMD of the end-to-end link made up of randomly chosen cable sections spliced together. Thus the LDV represents the worst case PMD of a fiber path in a cabled and deployed span.
PMD standards indicate that LDV should be calculated from nominally 20 to 24 sections and have a maximum cumulative distribution Q of nominally 0.001 to 0.0001. This implies that 0.1% or 0.01% of all spans (made up of concatenated sections) would be above this level of PMD.
>> What is system PMD?
System PMD is the total PMD attributed to the collection of optical components that makes up an optical link between a transmitter and a receiver. Many of these components are illustrated in the following figure.
Indeed, optical fiber may only be one of the components if amplification, power splitting, dispersion compensation or optical multiplexing is used in the link.
With PMD performance of cabled optical fibers continuing to decrease, more emphasis will be place on the PMD performance of the other components in the link.
Typically, in a long haul system, the PMD attributed to the optical fiber itself is given half of the system PMD budget. The system PMD is calculated from the square root of the sum of the squares of each individual component PMD.
>> How much PMD can be tolerated in my system?
The level of system PMD that can be tolerated depends on data rate, distance and how much system outage one is willing to tolerate.
The following figure indicates the average system outage as a function of system PMD for 10, 40 and 80 Gbps systems.
As can be seen in this figure, as the system PMD limit for a given bit rate is approached, slight increases in PMD will cause significant increases in system outage.
International standard guidelines for PMD recommend an outage probability of 6.5 x 10-8, corresponding to 2 seconds of outage per year attributable to PMD.
Coupled with the 50% recommendation of system PMD that should be allocated for optical fiber, a goal for a 10 Gbps system would be a cabled optical fiber with ~ 4 ps of total PMD. This drops to below 1 ps if a 40 or 80 Gbps system is envisioned operating on this fiber in the future.
The PMD requirement on your cabled fiber is now only dependent on knowing the distance of the route. For example if you have a 100 km link at 10 Gbps, then your cabled fiber should have a LDV below 0.4 ps/sqrt(km).
For longer distances, the LDV requirements become even more stringent such that at 1000 km, a 10 Gbps system would require a cabled fiber LDV of < 0.13 ps/sqrt(km) while a 40 Gbps system would need a value < 0.03 ps/sqrt(km).
Errors induced by PMD may be difficult to isolate. Since PMD is statistical in nature and varies with wavelength and time, errors can appear in random, frequent burst or long durations.
Errors may appear later in the life of a link as the cable plant ages and environmental factors change its performance. There are a host of external factors that can influence the PMD behavior of a link, from seasonal changes in temperature, to the effects of wind, to vibrations from proximity to railroad tracks or large building equipment.
>> How do I guard against the transient nature of PMD?
The best way to guard against the transient nature of PMD is to use a fiber that has been manufactured with a process that both lowers PMD and provides PMD stability with environmental changes.
>> Can I fix or compensate for PMD?
Yes, but it is generally an added cost since it must be done on a per channel basis.
There are two ways to compensate for PMD, optically or electronically.
Optical PMD compensation is done by splitting the signal into two polarization states, actively measuring the PMD of a signal and adjusting an optical delay line to retard or advance one of the polarizations. These techniques were generally very expensive and never were widely deployed.
Electronic PMD compensation can be done using adaptive processing techniques, but have limited range of compensation and are difficult to scale to higher data rates, such as at 40 Gbps. It is best to minimize your needs for compensation by installing low PMD optical fiber and components.
>> Are there standards for PMD?
yes, there are several documents that establish guidelines for everything from measurement of PMD to methods to determine LDV to how to concatenate components for a complete system view of PMD.
There is the IEC 60793-3 that describes the statistical specification of PMD for optical fiber cables, the IEC 61282-3 that has guidelines for calculations of PMD in fiber optic systems.
Recommended levels of PMD in cabled fiber can be found in ITU-T G.652 and ITU-T G.655 for non-dispersion shifted fiber and non-zero dispersion fiber, respectively.
Typically, these are minimal requirements for PMD performance.
>> There is so much ambiguity in PMD specifications. What should I be looking for?
The most important specification one can look for is cabled fiber link design value (LDV), also referred to as quadrature average PMD (PMDQ) in standards bodies, such as ITU.
Purchased optical fiber is cabled, installed and concatenated with other cables along a route, so it makes sense to review a specification that best represents the PMD performance of deployed fiber.
Cabled fiber LDV does just that and is straightforward to use in a system design analysis. It is the worst-case representation of the optical fiber’s contribution to system PMD.
>> What should I ask of my fiber cable supplier in terms of a PMD specification?
We recommend that the customer insist on data from the cable manufacturer that establishes a correlation between fiber PMD and cable PMD and that provides a cabled fiber LDV value to meet the applications’ needs.
Since PMD may have some dependencies on cable construction also, we suggest PMD specifications that most closely represent the cable type of interest.
Quality assurance programs must also be in place to ensure that data reported in the specifications is repeatable and therefore meaningful.
>> Is the sensitivity to PMD, fiber design – or manufacturer dependent?
Much of the sensitivity of a fiber to PMD is due to the manufacturing process. There is some variation from fiber type to fiber type due to design, but low PMD is generally achieved by quality and process control during fiber manufacturing.
>> How do I test an incoming cable or fiber for PMD?
It is difficult to check PMD before installation. Fiber measurements on spool are notoriously unreliable. Loose coils (greater than 30 cm diameter) are one approach, though many fiber samples need to be measured before one can assess the PMD.
Cable measurements present the same difficulties. Short cable lengths (less than 10 km) can be measured on-reel, but again, many measurements are required.
The cable manufacturer should be able to give an estimate of the change in PMD expected when the cable is taken off the reel. It is suggested that the test set be capable of measuring a PMD value below 0.01ps.
>> Why is the minimum measurable PMD length dependent?
The “PMD coefficient”, with units of ps/km1/2, indicates the rate at which PMD builds up along the fiber length.
For a fixed length, a “PMD value”, with units of ps, can be measured. Test sets have a minimum measurable PMD value. For fiber with a low PMD coefficient, a long fiber length is required for accurate measurement.
For example, if a 0.02 ps/km1/2 fiber is measured using an interferometric test set with a minimum PMD of 0.1 ps, one would requires 25 km of fiber.
>> What are the limitations to measurement of low PMD?
It has been shown some time ago that all PMD measurement methods have an associated uncertainty depending on the bandwidth of the test set and the size of the PMD value being measured.
This uncertainty, U, takes the mathematical form:
where Δω is the instrument bandwidth and “PMD” is the correct PMD value.
For the low values of PMD in fiber, this uncertainty is substantial, even for very wide instrument bandwidths (> 100 nm at 1550nm). A simple calculation shows that with a 120 nm bandwidth (typical of the Jones Matrix Eigenanalysis test set, the IEC referenced standard and most widely accepted test method) a measurement of a 0.1 ps PMD value (corresponding to 25 km of good fiber mentioned earlier) will result in a 33% uncertainty.
This uncertainty can only be overcome by varying something other than wavelength when the measurement is made (other choices are temperature or fiber position).
In any case, more than one measurement is needed if you want to measure low values with small uncertainty.
>> What is a “low mode coupled” PMD measurement?
Realizing that the PMD measurement of fiber on the spool or cable on the reel is very inaccurate, thought has been given to a more representative configuration that will reflect that performance of installed cable.
Current standards (IEC 60793-1-48) suggest using a large diameter drum, loose coil, or flat surface for fiber or cable layout. We have found that the most reliable method is using the flat surface.
For fibers that have little mode coupling (such as unspun fiber), all configurations involving bending, dramatically increase mode coupling and produce an erroneously low PMD value.
On the other hand, fibers that are spun and highly mode coupled, tend to show higher PMD when coiled. In either case, correct answers are obtained using the flat surface.
The low mode coupled measurements have the disadvantage that only short lengths of fiber can be used. In this case, the instrument bandwidth limitations become important. For this reason, all low mode coupled measurements require some method of enhanced sampling, such as variation of fiber temperature or position in order to actually measure PMD.
>> Is it possible to measure PMD with an OTDR?
No, a traditional optical time domain reflectometer (OTDR) only measures loss and optical reflections. However, there are newly available polarization-OTDRs (POTDR) that can isolate and measure high levels of PMD along the length of a route.
>> I am not running high bit rates, like 10 or 40 Gbps, now, should I be concerned about PMD?
The timeframe for getting to 10 Gbps data rates or beyond and the length of the time the fiber is expected to last, determines the need for concern over high PMD.
Once fiber is purchased and installed, compensation if needed, can prove costly, complex or limiting. Many network builds are intended to be in service for well over twenty years.
Over the last ten years, data rates have increased a hundred fold as personal computers have increased in processing speed. Looking forward, as Moore’s law driven improvements in microelectronics speed continue and optical transmission component costs decrease, transmission rates of 40 Gbps and beyond will be reasonable expectations and PMD will be important.
>> Is there any correlation between chromatic dispersion and PMD?
No, chromatic dispersion is a result of materials used in the core of the optical fiber as well as the waveguide design. PMD is a result of imperfections in the circular uniformity of the core as a result of a host of internal or external effects such as eccentricity, ovality, core/cladding defects, external bends or pressure, etc.
>> Should I worry about PMD in a multimode fiber?
In general, multimode fiber is only used on very short lengths (< 1km) and at lower data rates (< 10 Gbps) such that PMD for these types of optical fibers is not of concern.
WSS stands for Wavelength Selective Switch. WSS has become the central heart of modern DWDM reconfigurable Agile Optical Network (AOC).
WSS can dynamically route, block and attenuate all DWDM wavelengths within a network node. The following figure shows WSS’s functionality.
The above figure shows that a WSS consists of a single common optical port and N opposing multi-wavelength ports where each DWDM wavelength input from the common port can be switched (routed) to any one of the N multi-wavelength ports, independent of how all other wavelength channels are routed.
This wavelength switching (routing) process can be dynamically changed through a electronic communication control interface on the WSS. So in essence, WSS switches DWDM channels or wavelengths.
There are also variable attenuation mechanism in WSS for each wavelength. So each wavelength can be independently attenuated for channel power control and equalization.
2. How Does a WSS Work?
There are several WSS switching engine technologies on the market today, here we will demonstrate a MEMS based design. The different switching technologies will be discussed in the next section.
A) 1X2 Configuration
The following figure shows a diffraction grating and MEMS based 1×2 wavelength selective switch.
The light from a fiber is collimated by a lens with focal length f and demultiplexed by diffraction off the grating.
The direction of the beam after the grating will depend on the wavelength λ0 of the beam. The diffracted beams then pass through the lens for a second time, and the spectrally resolved light is focused on the reflective linear MEMS device, which is also referred as 1D (1 dimension) MEMS device. The MEMS device then either changes the amplitude (attenuate) or the direction of the beam.
The reflected light passes through the lens and is wavelength-multiplexed by diffraction off the grating, and finally the lens couples the light back into the fiber. The output light is separated from the input light by a circulator.
B) 1XN Wavelength Selective Switch
The 1XN switch can be considered as a generalization of the 1×2 switch. Because every wavelength in the 1XN switch can be switched to any one of the N output ports, this switch can be used in a fully flexible OADM (Optical Add Drop Multiplexer) with multiple add/drop fiber ports, each of which carries single or multiple wavelengths.
1XN switches can be cascaded to form larger architectures, and NxN wavelength selective matrix can be built by interconnecting back-to-back 1XN switches.
Let’s look at the optical design of the 1XN wavelength selective switch (WSS).
In the 1xN switch design, it uses an additional lens in Fourier transform configuration to perform a space to angle conversion in the first stage of the switch. Also the 1xN switch will require tilt mirrors with N different tilt angles. These are usually implemented as analog mirrors.
Here is how the design works.
The common input fiber enters the switch at point A where light is collimated by a microlens.
The following lens image the collimated beam on the diffraction grating at point C.
The wavelength dispersed beams fall then onto the MEMS device plane D
On MEMS device plane D, the beams are reflected with certain tilt angle depending on micromirrors’ setting.
All reflected beams are focused on point B again, where the angle to space conversion section will image the beam on the output fiber. Each output corresponds to a specific tilt angle of the micromirrors.
This MEMS based switch can switch as many as 128 wavelengths with 50 GHz spacing. The total insertion loss is less than 6 dB. It uses a 100mm focal length mirror and a 1100 lines/mm grating. The micromirrors can be actuated by +/- 8° using a voltage of <115V and the switch can be used as variable attenuator by detuning the tilt angle of the micromirrors.
3. WSS Switching Engine Technologies
The optical design we discussed in the previous section is based on MEMS micromirrors. Here we will discuss several more switching engine technologies.
A. MEMS Switching Engine
Micromirror array is fabricated in silicon, using wafer scale lithographic processes leveraged from semiconductor industry.
When voltage is applied to electrode, it causes mirror to tilt due to electrostatic attraction. Attenuation is provided by tilting to offset the beam slightly at the output fiber. A angle-to-offset lens converts beam tilt to beam displacement at an input/output fiber array.
The advantage is that offset perpendicular to wavelength dispersion direction gives attenuation with no change in channel shape as shown below.
The tradeoffs are between mechanical resonance frequency (hinge stiffness), driving voltage, and tilt angle often result in high driving voltages.
B. Liquid Crystal (LC) Switching Engine Principle
Liquid crystal cell selectively controls the polarization state of transmitted light by application of a control voltage as shown below.
For the switching process to work, the liquid crystal cell (LC) must be followed by a polarization dependent optical element such as a PBS (Polarization Beam Splitter) to change the path of the transmitted light based on their polarization.
Random polarized input must be separated into two orthogonal polarizations.
In a binary switching configuration, N liquid crystal (LC) cells can select among 2N output ports. And an extra liquid crystal (LC) cell and polarizer can be used to provide attenuation.
C. LCoS (Liquid Crystal on Silicon)
The following two graphics show Liquid Crystal on Silicon (LCoS) technology and the optical design of an wavelength selective switch based on LCoS switching technology.
A LCoS-based switch engine built uses an array of phase controlled pixels to implement beam steering by creating a linear optical phase retardation in the direction of the intended deflection.
LCOS is a display technology which combines Liquid Crystal and semiconductor technologies to create a high resolution, solid-state display engine. In WSS design, the LCoS is used to control the phase of light at each pixel to produce an electrically-programmable grating. This can control the beam deflection in a vertical direction by varying either the pitch or blaze of the grating whilst the width of the channel is determined by the number of pixel columns selected in the horizontal direction.
In the WSS design, it incorporates polarization diversity, control of mode size and a 4-f wavelength optical imaging in the dispersive axis of the LCoS providing integrated switching and optical power control.
In operation, the light passes from a fiber array through the polarization diversity optics which both separates and aligns the orthogonal polarization states to be in the high efficiency s-polarization state of the diffraction grating. The light from the input fiber is reflected from the imaging mirror and then angularly dispersed by the grating, reflecting the light back to the cylindrical mirror which directs each optical frequency (wavelength) to a different portion of the LCoS. The path for each wavelength is then retraced upon reflection from the LCoS, with the beam-steering image applied on the LCoS directing the light to a particular port of the fiber array.
4. Switch Engine Technologies and Minimum Achievable Spot Sizes
Some switching engine technologies require a minimum beam size to function properly, and thus place a limit on the minimum optical system length for a give channel passband width, channel spacing, and dispersive element.
The advantages of a small optical system size include a smaller overall module footprint, greater functional density, lower packing cost, and greater tolerance to mechanical shock and environmental conditions.
The following figure shows the minimum spot size for various switch engine technologies.
The buffer or jacket on patchcords is often color-coded to indicate the type of fiber used. The strain relief “boot” that protects the fiber from bending at a connector is color-coded to indicate the type of connection. Connectors with a plastic shell (such as SC connectors) typically use a color-coded shell. Standard color codings for jackets and boots (or connector shells) are shown below:
Article written by:-Engineering and Marketing Staff, OFS, Specialty Photonics Div.
Nothing has changed the world of communications as much as the development and implementation of optical fiber. This article provides the basic principles needed to work with this technology.
Optical fibers are made from either glass or plastic. Most are roughly the diameter of a human hair, and they may be many miles long. Light is transmitted along the center of the fiber from one end to the other and a signal may be imposed. Fiber optic systems are superior to metallic conductors in many applications. Their greatest advantage is bandwidth. Because of the wavelength of light, it is possible to transmit a signal which contains considerably more information than is possible with a metallic conductor — even a coaxial conductor. Other advantages include:
• Electrical Isolation — Fiber optics do not need a grounding connection. Both the transmitter and the receiver are isolated from each other and are therefore free of ground loop problems. Also, there is no danger of sparks or electrical shock.
• Freedom from EMI — Fiber optics are immune to electromagnetic interference (EMI), and they emit no radiation themselves to cause other interference.
• Low Power Loss — This permits longer cable runs and fewer repeater amplifiers.
• Lighter and Smaller — Fiber weighs less and needs less space than metallic conductors with equivalent signal-carrying capacity.
Copper wire is about 13 times heavier. Fiber also is easier to install and requires less duct space.
Applications
Some of the major application areas of optical fibers are:
• Communications — Voice, data and video transmission are the most common uses of fiber optics, and these include:
– Telecommunications
– Local area networks (LANs)
– Industrial control systems
– Avionic systems
– Military command, control and communications systems
• Sensing — Fiber optics can be used to deliver light from a remote source to a detector to obtain pressure, temperature or spectral information. The fiber also can be used directly as a transducer to measure a number of environmental effects, such as strain, pressure, electrical resistance and pH. Environmental changes affect the light intensity, phase and/or polarization in ways that can be detected at the other end of the fiber.
• Power Delivery — Optical fibers can deliver remarkably high levels of power for such tasks as laser cutting, welding, marking and drilling.
• Illumination — A bundle of fibers gathered together with a light source at one end can illuminate areas that are difficult to reach — for example, inside the human body, in conjuction with an endoscope. Also, they can be used as a display sign or simply as decorative illumination.
Construction
An optical fiber consists of three basic concentric elements: the core, the cladding and the outer coating (Figure 1).
Figure 1. An optical fiber consists of a core, cladding and coating.
The core is usually made of glass or plastic, although other materials are sometimes used depending on transmission spectrum desired.
The core is the light transmitting portion of the fiber. The cladding usually is made of the same material as the core, but with a slightly lower index of refraction (usually about one percent lower). This index difference causes total internal reflection to occur at the index boundary along the length of the fiber so that the light is transmitted down the fiber and does not escape through the side walls.
The coating usually comprises one or more coats of a plastic material to protect the fiber from the physical environment. Sometimes metallic sheaths are added to the coating for further physical protection.
Optical fibers usually are specified by their size, given as the outer diameter of the core, cladding and coating. For example, a 62.5/125/250 would refer to a fiber with a 62.5-µm diameter core, a 125-µm diameter cladding and a 0.25-mm outer coating diameter.
Principles
Optical materials are characterized by their index of refraction, referred to as n. A material’s index of refraction is the ratio of the speed of light in a vacuum to the speed of light in the material. When a beam of light passes from one material to another with a different index of refraction, the beam is bent (or refracted) at the interface (Figure 2).
Figure 2. A beam of light passing from one material to another of a different index of refraction is bent or refracted at the interface.
Refraction is described by Snell’s law:
where nI and nR are the indices of refraction of the materials through which the beam is refracted and I andR are the angles of incidence and refraction of the beam. If the angle of incidence is greater than the critical angle for the interface (typically about 82° for optical fibers), the light is reflected back into the incident medium without loss by a process known as total internal reflection (Figure 3).
Figure 3. Total internal reflection allows light to remain inside the core of the fiber.
Modes
When light is guided down a fiber (as microwaves are guided down a waveguide), phase shifts occur at every reflective boundary. There is a finite discrete number of paths down the optical fiber (known as modes) that produce constructive (inphase and therefore additive) phase shifts that reinforce the transmission. Because each of these modes occurs at a different angle to the fiber axis as the beam travels along the length, each one travels a different length through the fiber from the input to the output. Only one mode, the zero-order mode, travels the length of the fiber without reflections from the sidewalls. This is known as a single-mode fiber. The actual number of modes that can be propagated in a given optical fiber is determined by the wavelength of light and the diameter and index of refraction of the core of the fiber.
Attenuation
Signals lose strength as they are propagated through the fiber: this is known as beam attenuation. Attenuation is measured in decibels (dB) with the relation:
where Pin and Pout refer to the optical power going into and coming out of the fiber. The table below shows the power typically lost in a fiber for several values of attenuation in decibels.
The attenuation of an optical fiber is wavelength dependent. At the extremes of the transmission curve, multiphoton absorption predominates. Attenuation is usually expressed in dB/km at a specific wavelength. Typical values range from 10 dB/km for step-index fibers at 850 nm to a few tenths of a dB/km for single-mode fibers at 1550 nm.
There are several causes of attenuation in an optical fiber:
• Rayleigh Scattering — Microscopic-scale variations in the index of refraction of the core material can cause considerable scatter in the beam, leading to substantial losses of optical power. Rayleigh scattering is wavelength dependent and is less significant at longer wavelengths. This is the most important loss mechanism in modern optical fibers, generally accounting for up to 90 percent of any loss that is experienced.
• Absorption — Current manufacturing methods have reduced absorption caused by impurities (most notably water in the fiber) to very low levels. Within the bandpass of transmission of the fiber, absorption losses are insignificant.
Figure 4. Numerical aperture depends on the angle at which rays enter the fiber and the diameter of the fiber’s core.
• Bending — Manufacturing methods can produce minute bends in the fiber geometry. Sometimes these bends will be great enough to cause the light within the core to hit the core/cladding interface at less than the critical angle so that light is lost into the cladding material. This also can occur when the fiber is bent in a tight radius (less than, say, a few centimeters). Bend sensitivity is usually expressed in terms of dB/km loss for a particular bend radius and wavelength.
Numerical aperture
Numerical aperture (NA), shown in Figure 4, is the measure of maximum angle at which light rays will enter and be conducted down the fiber. This is represented by the following equation:
Dispersion
As the optical pulses travel the length of the fiber, they are broadened or lengthened in time. This is called dispersion. Because the pulses eventually will become so out of step that they begin to overlap each other and corrupt the data, dispersion sets an upper limit on the data-carrying capabilities of a fiber. There are three principal causes for this broadening:
• Chromatic Dispersion — Different wavelengths travel at different velocities down the fiber. Because typical light sources provide power over a series or range of wavelengths, rather than from a single discrete spectral line, the pulses must spread out along the length of the fiber as they proceed. The high-speed lasers used in communications have very narrow spectral output specifications, greatly reducing the effect of chromatic dispersion.
• Modal Dispersion — Different fiber modes reflect at different angles as they proceed down the fiber. Because each modal angle produces a somewhat different path length for the beam, the higher order modes reach the output end of the fiber behind the lower order modes. • Waveguide Dispersion — This minor cause for dispersion is due to the geometry of the fiber and results in different propagation velocities for each of the modes.
Bandwidth
Bandwidth measures the data-carrying capacity of an optical fiber and is expressed as the product of the data frequency and the distance traveled (MHz-km or GHz-km typically). For example, a fiber with a 400-MHz-km bandwidth can transmit 400 MHz for a distance of 1 km or it can transmit 20 MHz of data for 20 km. The primary limit on bandwidth is pulse broadening, which results from modal and chromatic dispersion of the fiber. Typical values for different types of fiber follow:
Power transmission
The amount of power that a fiber can transmit (without being damaged) is usually expressed in terms of the maximum acceptable power density. Power density is the product of the maximum power output of the laser and the area of the laser beam. For example, a 15-W laser beam focused onto a 150-µm diameter spot produces a power density of
The output of a pulsed laser (typically specified in millijoules of energy per pulse) must first be converted to power per pulse. For example, a pulsed laser that produces 50 mJ in a 10-ns pulse provides an output power of
The power density then can be calculated from the spot size.
To transmit the absolute maximum energy levels down a fiber, the fiber end faces must be absolutely smooth and polished and be perpendicular to the fiber axis and the light beam. Also, the beam diameter should be no greater than approximately one-half of the area of the core (or the diameter of the core). If the beam is not appropriately focused, some of the energy may spill into the cladding, which quickly can damage polymer-clad silica fibers. For this reason it is better to use silica-clad silica fibers in higher power density applications.
Fiber types
There are basically three types of optical fiber: single-mode, multimode graded-index and multimode step-index. They are characterized by the way light travels down the fiber and depend on both the wavelength of the light and the mechanical geometry of the fiber. Examples of how they propagate light are shown in Figure 5.
Single-mode
Only the fundamental zero-order mode is transmitted in a single-mode fiber. The light beam travels straight through the fiber with no reflections from the core-cladding sidewalls at all. Single-mode fiber is characterized by the wavelength cut-off value, which is dependent on core diameter, NA and wavelength of operation. Below the cut-off wavelength, higher order modes may also propagate, which changes the fiber’s characteristics.
Figure 5. Modes of fiber transmission.
Because the single-mode fiber propagates only the fundamental mode, modal dispersion (the primary cause of pulse overlap) is eliminated. Thus, the bandwidth is much higher with a single-mode fiber than that of a multimode fiber. This simply means that pulses can be transmitted much closer together in time without overlap. Because of this higher bandwidth, single-mode fibers are used in all modern long-range communication systems. Typical core diameters are between 5 and 10 µm.
The actual number of modes that can be propagated through a fiber depends on the core diameter, the numerical aperture, and the wavelength of the light being transmitted. These may be combined into the normalized frequency parameter or V number,
where a is the core radius, λ is the wavelength and n is the index of the core and the cladding. The condition for single-mode operation is that
Perhaps more important and useful is the cut-off wavelength. This is the wavelength below which the fiber will allow propagation of multiple modes and can be expressed as:
A fiber is typically chosen with a cut-off wavelength slightly below the desired operating wavelength. For lasers typically used as sources (with output wavelengths between 850 and 1550 nm) the core diameter of a single-mode fiber is in the range of 3 to 10 µm.
Multimode graded-index
The core diameters of multimode fibers are much larger than single-mode fibers. As a result, higher order modes also are propagated.
The core in a graded-index fiber has an index of refraction that radially decreases continuously from the center to the cladding interface. As a result, the light travels faster at the edge of the core than in the center. Different modes travel in curved paths with nearly equal travel times. This greatly reduces modal dispersion in the fiber.
As a result, graded-index fibers have bandwidths which are significantly greater than step-index fibers, but still much lower than single-mode fibers. Typical core diameters of graded-index fibers are 50, 62.5 and 100 µm. The main application for graded-index fibers is in medium-range communications, such as local area networks.
Multimode step-index
The core of a step-index fiber has a uniform index of refraction right up to the cladding interface where the index changes in a step-like fashion. Because different modes in a step-index fiber travel different path lengths in their journey through the fiber, data transmission distances must be kept short to avoid considerable modal dispersion problems.
Step-index fibers are available with core diameters of 100 to 1500 µm. They are well suited to applications requiring high power densities, such as medical and industrial laser power delivery.
The OSI, or Open System Interconnection, model defines a networking framework for implementing protocols in seven layers. Control is passed from one layer to the next, starting at the application layer in one station, proceeding to the bottom layer, over the channel to the next station and back up the hierarchy.
Easy Way to Remember the OSI 7 Layer Model
Application(Layer 7)This layer supports application and end-user processes. Communication partners are identified, quality of service is identified, user authentication and privacy are considered, and any constraints on data syntax are identified. Everything at this layer is application-specific. This layer provides application services for file transfers, e-mail, and other network software services.
Presentation(Layer 6) This layer provides independence from differences in data representation (e.g., encryption) by translating from application to network format, and vice versa. This layer formats and encrypts data to be sent across a network, providing freedom from compatibility problems. It is sometimes called the syntax layer.
Session(Layer 5) This layer establishes, manages and terminates connections between applications. The session layer sets up, coordinates, and terminates conversations, exchanges, and dialogues between the applications at each end. It deals with session and connection coordination.
Transport(Layer 4) This layer provides transparent transfer of data between end systems, or hosts, and is responsible for end-to-end error recovery and flow control. It ensures complete data transfer.
Network(Layer 3) This layer provides switching and routing technologies, creating logical paths, known as virtual circuits, for transmitting data from node to node. Routing and forwarding are functions of this layer, as well as addressing, internetworking, error handling, congestion control and packet sequencing.
Data Link(Layer 2) At this layer, data packets are encoded and decoded into bits. It furnishes transmission protocol knowledge and management and handles errors in the physical layer, flow control and frame synchronization. The data link layer is divided into two sublayers: The Media Access Control (MAC) layer and the Logical Link Control (LLC) layer. The MAC sublayer controls how a computer on the network gains access to the data and permission to transmit it. The LLC layer controls frame synchronization, flow control and error checking.
Physical(Layer 1) This layer conveys the bit stream – electrical impulse, light or radio signal — through the network at the electrical and mechanical level. It provides the hardware means of sending and receiving data on a carrier, including defining cables, cards and physical aspects.
OSI Layer Model for concentrators
Hubs/Repeaters are found in the Physical Layer
Switches /Bridges/Wireless Access Point are found in the Data Link Layer
Routers are found in the Network Layer
Gateway are found in All 7 of the OSI Layers
Brouter are found in both the Data Link and Network Layer


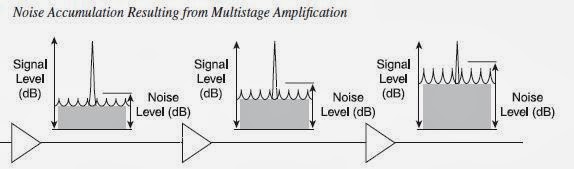

































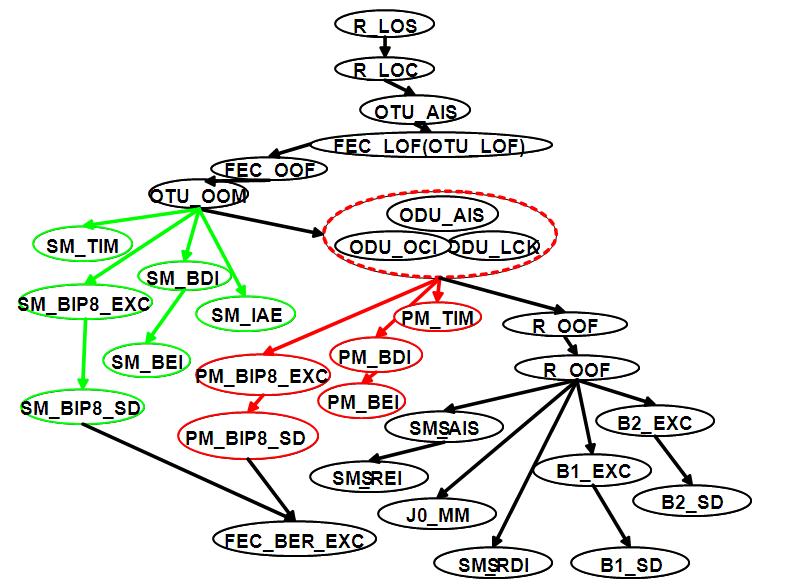
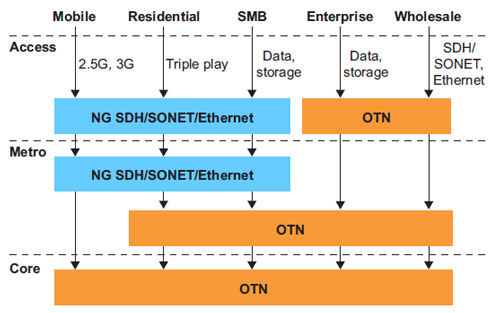
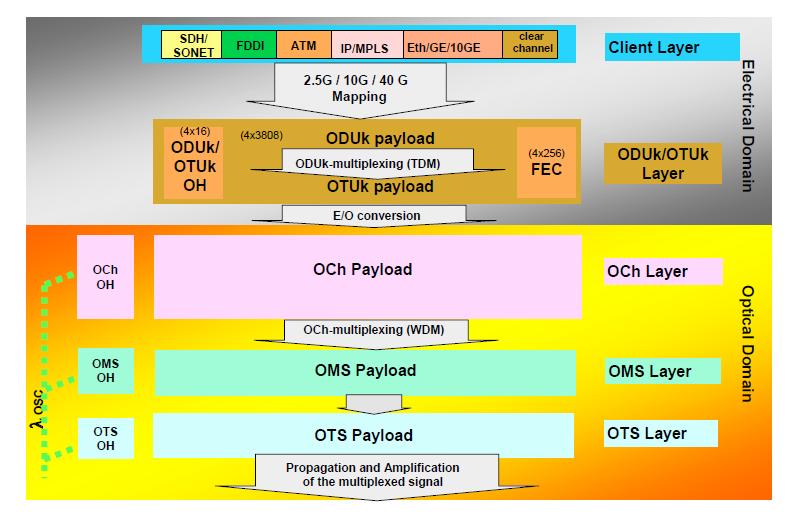
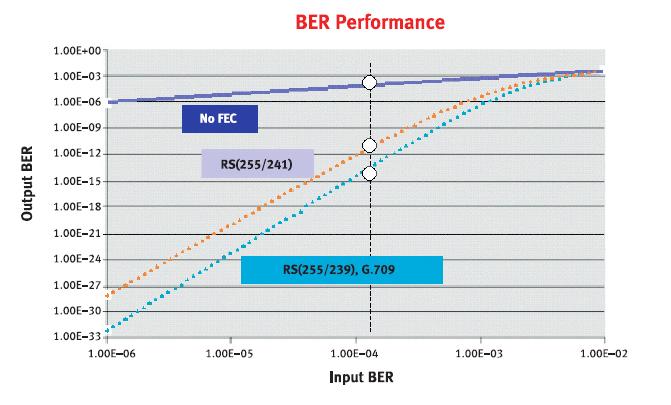


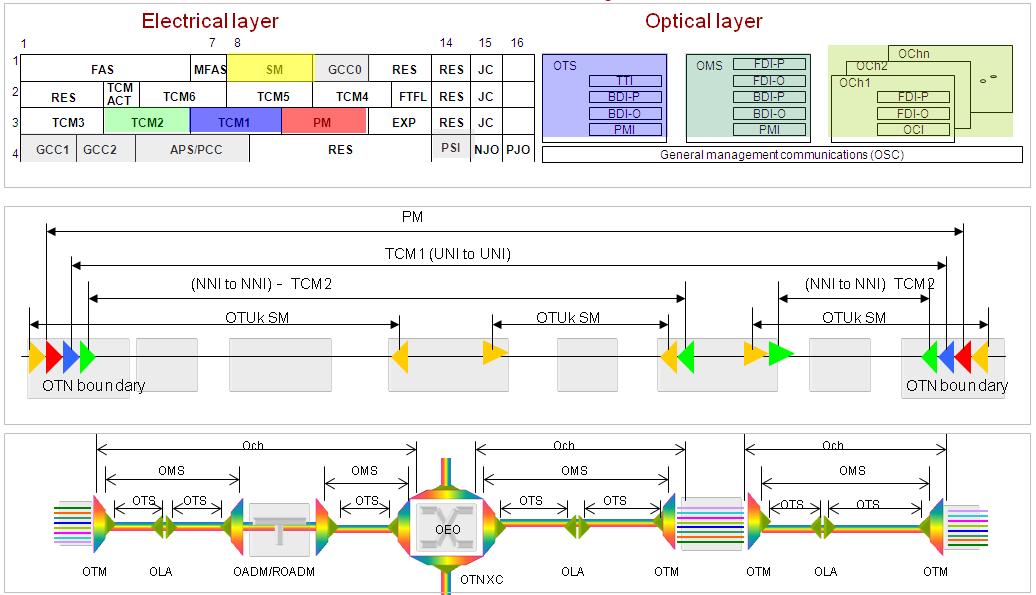
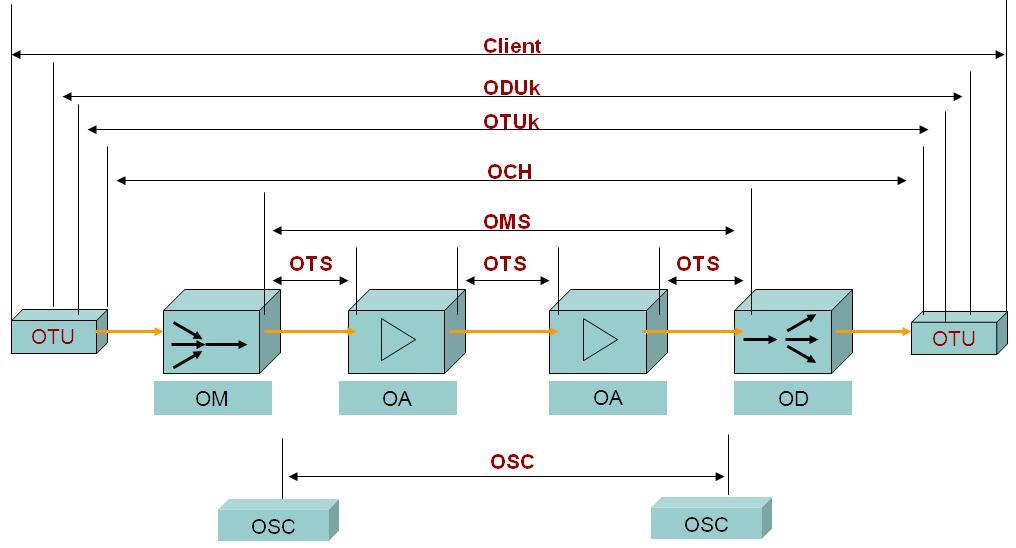
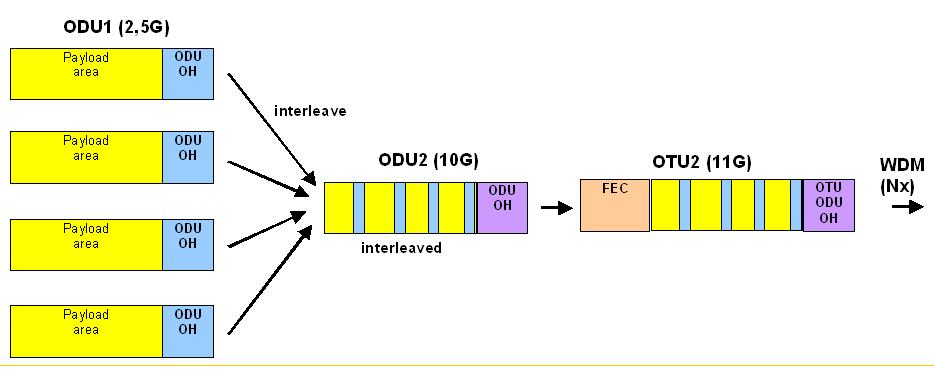
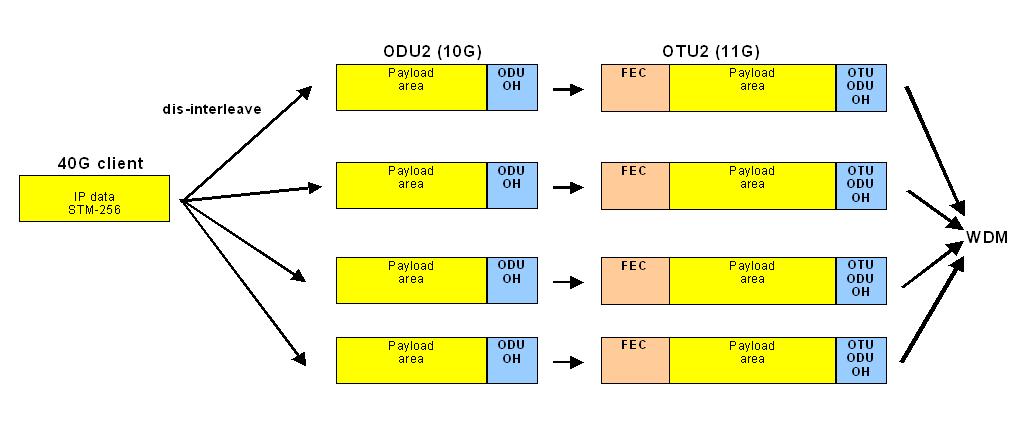
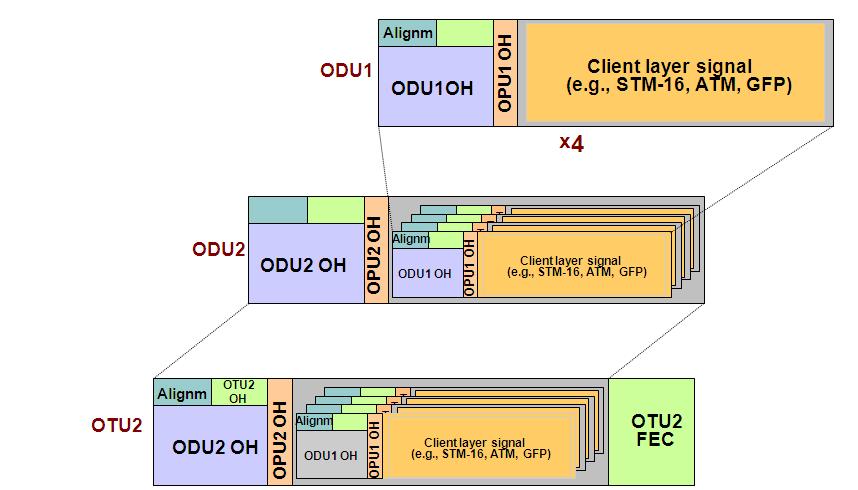




 Functionality")










 cells can select among 2N output ports. And an extra liquid crystal (LC) cell and polarizer can be used to provide attenuation.")









 The attenuation of an optical fiber is wavelength dependent. At the extremes of the transmission curve, multiphoton absorption predominates. Attenuation is usually expressed in dB/km at a specific wavelength. Typical values range from 10 dB/km for step-index fibers at 850 nm to a few tenths of a dB/km for single-mode fibers at 1550 nm.
The attenuation of an optical fiber is wavelength dependent. At the extremes of the transmission curve, multiphoton absorption predominates. Attenuation is usually expressed in dB/km at a specific wavelength. Typical values range from 10 dB/km for step-index fibers at 850 nm to a few tenths of a dB/km for single-mode fibers at 1550 nm.

 Power transmission
Power transmission